
Baseband pulses are video or carrier-less pulses of very short duration. Their spectral content is concentrated primarily from zero frequency through the microwave region of the spectrum. This tutorial attempts to describe some of the vagaries of these pulses and their use in ground penetration radars and communications.
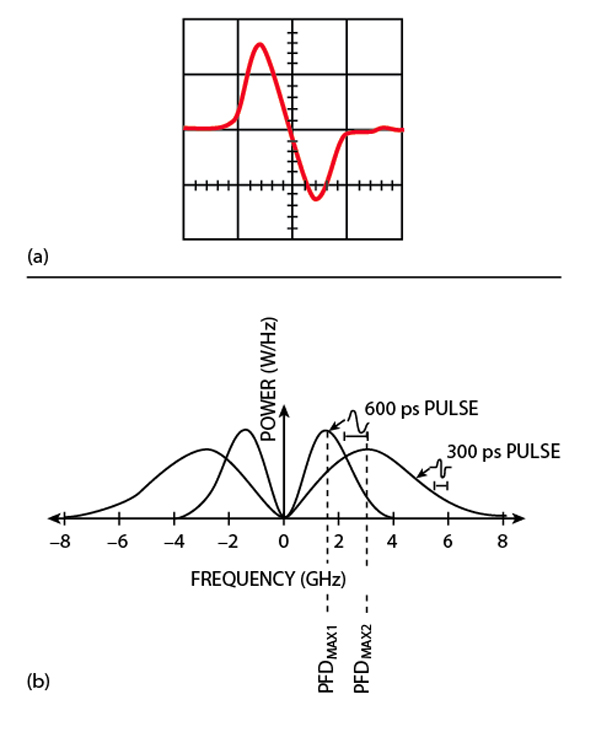
Figure 1 depicts a picosecond monocycle in time and the envelope of the spectra for two different pulse lengths. The time display of a single-shot monocycle of energy may also represent a few cycles at a center frequency carrier. It is noticed that the monocycle spectrum is not uniform, as one would expect for an impulse in time (see example D in Appendix A ). Integrating the power flux density (PFD) in watts/Hz under the envelope gives the total average power. If this were a continuous monocycle pulse train the spectra under the envelope would be discrete lines and separated by the pulse repetition frequency (see example B in Appendix A). If one curtails the pulse train (by gating with a gate width of T, for instance - see example C in Appendix A) each formally discrete spectral line will become a sinc function whose width is dictated by the gate width T. These concepts are shown in Figure 2 . None of the waveforms shown at this juncture have coding or information modulation. The pulse widths in UWB range from a few picoseconds to several nanoseconds. It may be recognized that different UWB applications operate best at different center frequency ranges. That is, one frequency may be more favorable for radar ground penetration and another for communication applications.
Appendix A

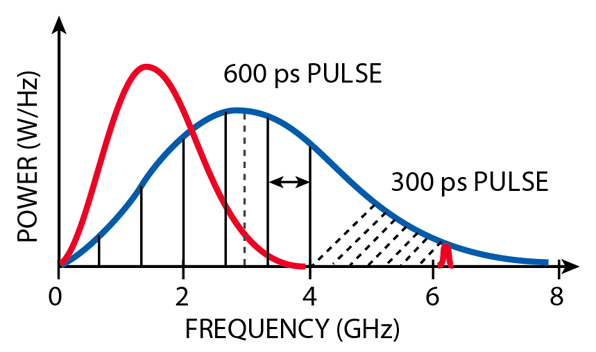
The monocycle pulse width establishes both the center frequency and energy distribution of the signal. For example, for a 300 ps pulse, the pulse has a center frequency of

For the longer pulse of 600 ps, the center frequency or the apex of the spectrum is

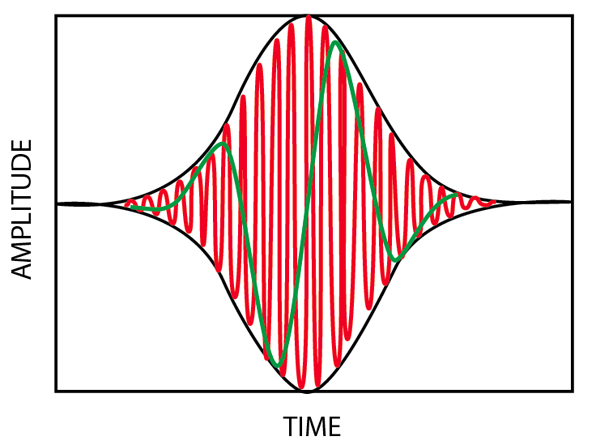
The monocycle has also been referred to as a Gaussian UWB monocycle. This suggests that the pulse envelope is a Gaussian curve. Note that a varying number of cycles under the envelope will determine the location of the center frequency. This is analogous to a rectangular RF pulse with different frequency under the envelope. Figure 3 shows two pulses that have different center frequencies.
Bandwidth
The usual definition of the percentage bandwidth (from WWII days) is given by

where
 f = difference between the lowest and highest frequencies
f = difference between the lowest and highest frequencies
fc = frequency of operation
For example, at S-band (2 to 4 GHz), the percentage bandwidth is

Another definition is given as the relative or fractional bandwidth

where
f = absolute bandwidth
fc = carrier (or center) frequency
Another way to express the bandwidth as a fraction of the center frequency is

The definitions above beg the question - what is the value of the high and low frequencies? DARPA's definition is when the power at the frequencies' extremes is down by 20 dB.
The FCC proposes to use the -10 dB points instead. Going from -20 to -10 dB requires a certain decrease of the numerical bandwidth. This is a practical choice since it may be difficult to measure down to -20 dB in the noise. It further requires that the -10 dB bandwidth must be between 3.1 and 10.6 GHz. The FCC restricts UWB communications activity to the frequency band between 3.1 and 10.6 GHz. In addition, the FCC sets emission limits equivalent to a transmission level of 75 nW/MHz between the limits 3.1 to 10.6 GHz. This amounts to an integral power
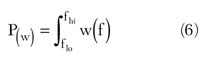
where
w(f) = power flux density
P(w) = 75x10-9 (W/MHz) x (10.6-3.1) x 103  0.5 mW
0.5 mW
In the notice of proposed rule making (NPRM), the FCC tentatively defines UWB devices as those devices where the fractional bandwidth is greater than 0.25 or at least 25 percent of its center frequency. For example, for a center frequency of 2 GHz, it would occupy a bandwidth of 500 MHz or more, measured at the -10 dB signal strength. Clearly, this is instantaneous bandwidth.
Modulation
Four modulation schemes have been proposed for UWB systems. These are:
• On-Off Keying (OOK)
• Pulse Amplitude Modulation (PAM)
• Binary Phase Shift Keying (BPSK)
• Pulse Position Modulation (PPM)
They are shown in Figure 4.
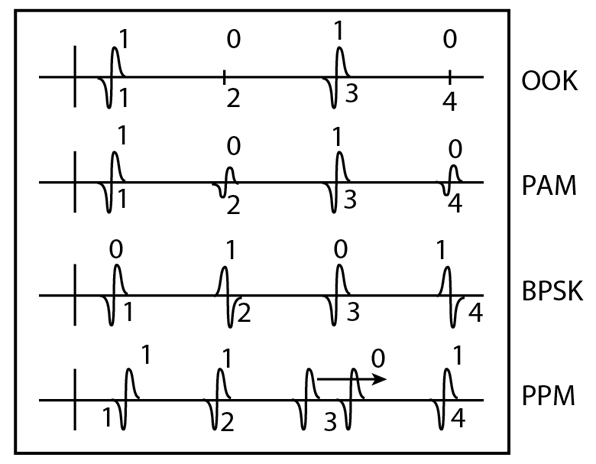
Note in PPM, the maximum modulating signal must not cause a pulse to enter adjacent allotted slot intervals. In PPM, the pulses are dithered in time according to the baseband information. In addition to the modulation, spread spectrum may be introduced, not for the purpose of spreading the spectrum (UWB signal does that adequately), but for tagging the signals and matching them to their respective receivers (the code in the transmitter must be synchronized to the code in the receiver). This causes additional smearing of the spectrum and further lowers the power flux density. The PPM dithers the spectrum, but not to the extent that would occur if one uses pseudorandom coding. It has been suggested by some researchers that very high data rate PPM systems may result in timing problems in order to recover the signal. Others have proposed using bipolar modulation in order to alleviate this problem. In addition, it is claimed that bipolar modulation has a better power efficiency than PPM. Other modulations have been used for ground penetrating radars, including OOK. It appears that all these modulations have their niche.
Impulse communication employs front-end correlation in which the incoming RF signal is converted to baseband. This correlation is able to pick out the signal that resides below the receiver noise floor. This has been referred to as homodyne detection. This is really an inappropriate definition of homodyne, and is normally referred to as a zero IF mixer. Zero IF mixers are used to detect Dopplerized signals. Probably a better definition is an energy detector where all frequency information is lost, but pulse width and signal strength is retained. The increasing signal strength after integration is referred to as receiver gain.
Multi-path in UWB Systems
Generally, multi-path signals are not a problem in UWB systems. A multi-path resolution, down to a nanosecond in differential delay, is equivalent to a differential delay path of one foot. d = c • t = 3.108 • 10-9 = 0.3 m 1 ft. A multi-path that arrives at the receiver 2 ns later will not interfere with the pulse that arrived directly. The margin requirements are thus reduced. This is not unlike a situation in spread spectrum systems in which a bona-fide signal (direct) will be de-spread in the receiver, but its delayed version by one chirp will not correlate and is thus rejected but contributes to "hash"noise. Other codes not matched (orthogonal) will contribute additional hash. Tests performed by both UCLA and Lucent have verified the UWB phenomenon.
Ranking in Performance
It may be possible to enhance performance by "raking in" the multi-path signals that arrive at the receiver at different delays. What immediately comes to mind are RAKE receivers. This concept has been used in low frequency propagation studies and more recently in cellular systems, in particular in systems using CDMA. RAKE receivers may now be put on a chip compared with the racks of equipment used by Price and Green in the 1958 time frame to manifest RAKE performance.
In a RAKE receiver, multiple replicas of the desired signal are received because of multi-path. Only the bona-fide or direct signal is in sync with the built-in receiver code, and thus is de-spread to receive the data message. In effect, the RAKE receiver "gathers up" various multi-path signals and increases the performance of the system. The multiple signals arriving at the receiver need to align themselves with the local code since they arrive at different times than the bona-fide signal. These multiple signals are generally delayed more than the spread signal chip width and thus can be recovered. The higher the chip rate, the more likely the echos with small delays can be processed by the RAKE receiver. For example, in the IS-95 CDMA cellular system, multi-path components that are less than 0.8 μs (chip width) apart cannot be separately identified or resolved.

Figure 5 shows two versions of a RAKE receiver. The first RAKE configuration is basically a delay line in which the signal is subjected to various delays. The tapped outputs are correlated with the local code, which is the same code that processes the bona-fide, non-faded signal.
The number of taps (fingers) on the delay line corresponds to the number of dominant multi-path signals that it is desirable to collect. There is a practical number of taps, above which there is a marginal improvement in performance. Five or six taps may be a reasonable number. The taps' location on the delay line may be adaptable since dominant echoes may vary in position if there is motion of the transmitter and/or the receiver. The location of dominants is performed by a "roving finger" or search finger and culls out the strongest multi-path for processing.
The total outputs of the taps are algebraically combined after the signals have been de-spread. That is, optimally combining via maximum ratio combining gives greater weight to the multi-path signals that have the highest signal-to-noise ratio. This artifice prevents the weaker signal from dragging down the composite signal-to-noise ratio.
In the second version of a RAKE receiver, the input signal drives a bank of correlators that are driven by the local code, subjected to different delays, as opposed to the delay line version where the code (undelayed) drives all correlators. The input multi-path signals will sync with one of these channels and are then summed.
Conclusion
In on-off keying a pulse is a one and the absence of a pulse is a zero. To the author's knowledge the military has been the main user of this form of modulation. Typically, the application is ground penetration radar.
In PAM, the amplitude is varied in two discrete steps for a zero and a one. However, in the presence of multi-path, it may be difficult to distinguish between a one or a zero because of the signal fluctuations due to multi-path.
In BPSK, the late half cycle (left side up) of the monocycle is used to represent a zero and the lead half (right side up) represents a one. There is no change in periodicity of the pulses. Researchers have indicated that by not dithering the pulses as in PPM permits sending pulses at a higher data rate. In addition, BPSK is more power efficient requiring less Eb /No than PPM to achieve the same BER.
In PPM, the difference between a one or a zero is determined by the arrival time of the pulses. That is, the pulses are dithered or changed in periodicity depending on whether a one or a zero has been sent. In the example, modulation for a long time lag, a zero was sent. For no time lag, a one was sent. Researchers have indicated for high data rates (proximity of the pulses) it may be difficult to accurately acquire the pulses. In the previously described signals, time jittering of the pulses may be used to avoid spectral spikes that may result from any periodicity.
It is this author's educated guess that eventually BPSK modulation will prevail because of its ease of implementation, power requirements and flexibility. BPSK, a binary system, gives the best BER for the minimum Eb /No (with no forward error correction).
Bruno Pattan is an electronics engineer at the FCC's Office of Engineering and Technology. He worked for many years as a radar system engineer at Sylvania (GTE), Lockheed and United Technologies, and on MILSATCOMS studies at Computer Sciences. He has published several papers and is the author of three books. He is a senior member of both the IEEE and the AIAA.