
Holographic radar system architectures are less complex than conventional surveillance array radar architectures, yet holographic radars offer capabilities exceeding those of the most sophisticated active electronically scanned array radars. Holographic radars can therefore challenge conventional radars in both cost and performance.
Holographic radar is not constrained by the sampling nature of scanning radar and so (loosely) has the capability to provide information with higher dimensionality. Fundamentally, staring radars meet the requirements of the Electromagnetic Uniqueness Theorem and provide an analytical solution to all electromagnetic interactions within their coverage. Conversely, scanning radars heavily under-sample so they cannot meet the same criteria. Some further benefits of staring radar are 1) the capability to provide very high Doppler frequency resolution by observation over dwell times unconstrained by the scan pattern or surveillance constraints and 2) contiguous measurement with high update rates, so fleeting, rapidly varying or complex returns can be sensed.
These characteristics enable high-resolution clutter rejection (i.e., detection in the presence of complex background environments of complex target returns) and optimized recognition and tracking. The efficacy of staring operation has been demonstrated with both modeled and real targets and clutter, on both large and small scales and in different applications.
As a basic example, consider detection of a complex maneuvering target. A scanning radar with a 2-degree azimuth beamwidth might detect and report its position every second, with a Doppler frequency resolution of 200 Hz. A holographic radar, however, can divide its radar return into 2 Hz wide components, for retaining and reporting a fine-grain Doppler signature, and fully sample its varying position and velocity, to rapidly determine changes in trajectory for effective tracking and threat assessment. As such, holographic radars provide both highly flexible radar coverage and utility, offering a solution to provide ubiquitous radar sensing - the ultimate in flexibility.
HOLOGRAPHIC RADAR ARCHITECTURE
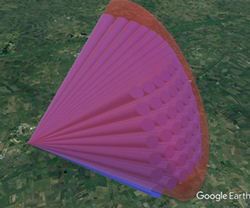
Figure 1 Holographic radar antenna patterns showing a broad transmit beam (red) and mesh of narrow receive beams (blue).
Fundamentally, the architecture of a holographic radar comprises a transmitter that constantly transmits over the entire field of view and an array receiver with a persistent mesh of narrow beams that fill the field of view, negating the need to scan to provide accurate angular measurements (see Figure 1). As a design consequence, the transmitter and the receiver units do not share a common aperture or common RF modules, since a broad transmit pattern is not efficiently produced by the type of multibeam array antenna required by the receiver. Such separation of the transmit and receive circuitry reduces their respective complexities (see Figure 2). The transmit antenna is usually a simple fixed planar array or a reflector antenna, and the receiver array is significantly simplified, since it does not contain high-power RF circuitry or complex transmit-receive switching elements.
Although staring radars have simplified RF, IF and control hardware and contain no moving parts, the consequence is increased processing complexity. The number of simultaneously processed beams is significantly increased. For example, a scanning radar typically processes only one beam at a time, while a staring radar processes many beams simultaneously. Also, the quantity of data processed in a single dwell is generally higher, to provide similar sensitivity to an equivalent scanning radar - since a scanning radar contains a high gain antenna on both transmit and receive - and to realize the benefits of a staring radar, such as high-resolution Doppler processing. Note, for example, the processing load of a fast Fourier transform, which is commonly used in radar signal processors, has an order greater than one with increasing length.
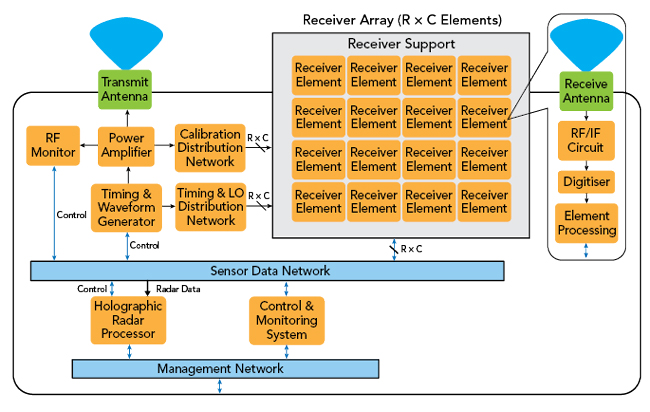
Figure 2 Holographic radar system architecture.
Staring radars tend to be smart, adaptable and defined by software. Furthermore, due to sensor persistence, staring radars are ideally suited to operate with multiple coincident modes in multiple, software-defined processing chains and/or cognitive processes.
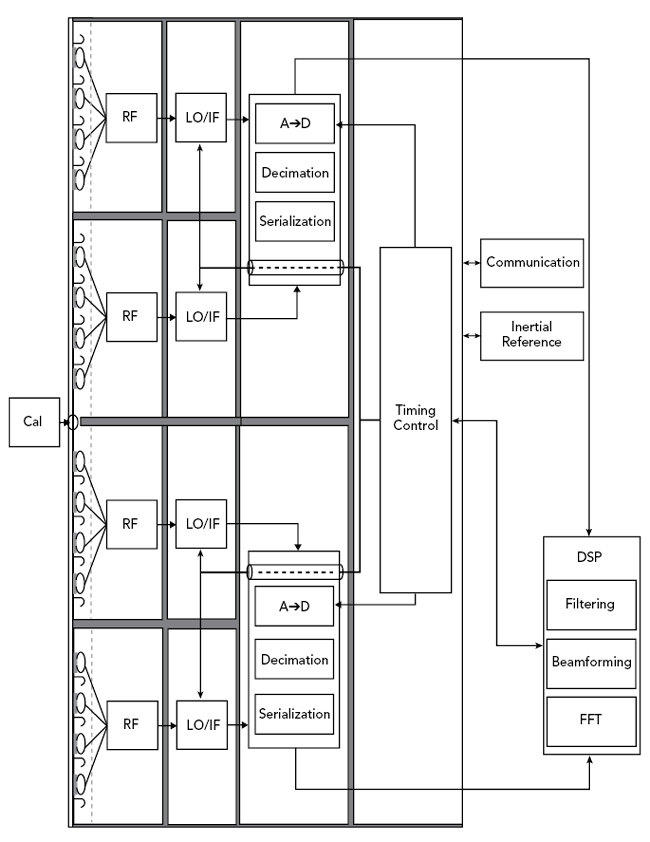
Figure 3 Hardware design approach enables multiple applications.
MODULAR ETHOS
The radar hardware is designed to be re-used for multiple applications and units that can be reconfigured (see Figure 3). This design ethos results in numerous atypical radar design features, including:
- Antenna elements spaced at λ/2, allowing scanning and adaptive processing over up to ±90 degrees from boresight.
- Independently digitized receiver elements to maximize flexibility, allowing the creation of small to large arrays.
- Signals digitized at IF to minimize calibration problems, with digital down-conversion local to the element, in addition to other rudimentary pulse-level, raw data radar-processing functions.
- Use of a single low phase noise oscillator reference distributed to all transmit and receive modules, each deriving its own RF frequencies and clocks. Each receiver module comprises just 2 x 2 elements, for high flexibility.
- Use of distributed simple timing signals, processed locally within each transmit and receive module for detailed timing.
- Transmit power generated in a single or small number of solid-state power amplifiers and distributed to a small number of transmitter elements, appropriate to broad-beam transmission.
- Near linear mode transmit power amplifier operation, with digitally controlled pulse-shaping technology to manage spectral masks and sidelobes.
- A calibration network for monitoring the transmitted waveform, so the smallest variations in performance can be tracked and accounted for.
- A flexible and expandable processing architecture comprising GPUs and general purpose server-class processors.