
HOLOGRAPHIC RADAR DEVELOPMENTS
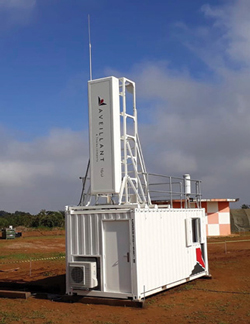
Figure 4 Radar developed for long-range detection, tracking and recognition of drones.
The original concept for holographic radar was as a C-Band demonstrator for a defense application. Successful proof of that concept led to the development of a long-range holographic radar for the civilian market, to address windfarm mitigation in air traffic management systems. Given existing air traffic control radar standards and long-range requirements for this application, L-Band was selected for its frequency of operation. From this early work, the Theia radar family1 was developed to address a range of applications, from land-based windfarm mitigation to longer range systems covering off-shore windfarms. With operational systems in continuous use for over five years, Theia is a good example of the expandable modular architecture in practice.
This modular architecture formed the foundation for developing a new concept radar with a conformal antenna, to investigate the efficient implementation of a staring array comprising 12 interdependent planar arrays for 360-degree azimuthal coverage. A demonstrator radar system, developed to explore this concept, contained four planar arrays, each with 128 receiver elements and sufficient transmit power to achieve 54 nautical mile detection of passenger aircraft. This four array demonstrator, nicknamed the Quad, was the basis for developing further ubiquitous radar sensing concepts and applications, including detecting drones. The initial investigations indicated the technology can support flight safety requirements: long-range detection, tracking and recognition of drones. A new product, named Gamekeeper, was rapidly developed to meet the needs of this emerging market, marking the coming of age of holographic radar (see Figure 4).
COUNTER DRONE RADAR
Radar is the only sensor capable of providing the essential sensing requirements for a drone surveillance and counter-UAV system: long-range, all weather performance; non-cooperative/autonomous drone detection and recognition; and consistent accuracy, coverage and performance. Market requirements for such a system are very demanding. They include: a high power-aperture product capable of detecting very low radar cross section (RCS) objects up to 7.5 km range; high dynamic range for detecting very low RCS objects in the presence of high clutter; high elevation accuracy for effectively discriminating air targets from ground objects; and high confidence tracking and recognition, to reduce the burden on operators given “confuser” targets in environments of interest. Normally, these requirements can only be met by large, high cost military radar systems, such as weapons locating radars.
Aveillant has addressed these market needs with a system more compatible with the civilian market. An initial operational capability for early adopters was developed for operational deployments in 100 days, by reconfiguring standard transmit and receive modules and commercial off-the-shelf (COTS) components used across Aveillant’s product line (see Figure 5). Gamekeeper radar’s capability has continuously evolved since its first operational deployment, with performance, stability and operational improvements released regularly, often multiple times per year, predominantly through software upgrades. These upgrades use a combination of adaptive agile development methodologies and the design features of holographic radar that make it a software-defined radar. This enables rapid technology insertion; in some cases, low technology readiness level techniques and technologies have been matured and implemented in the Gamekeeper radar to provide both step changes and continual improvements in capabilities.
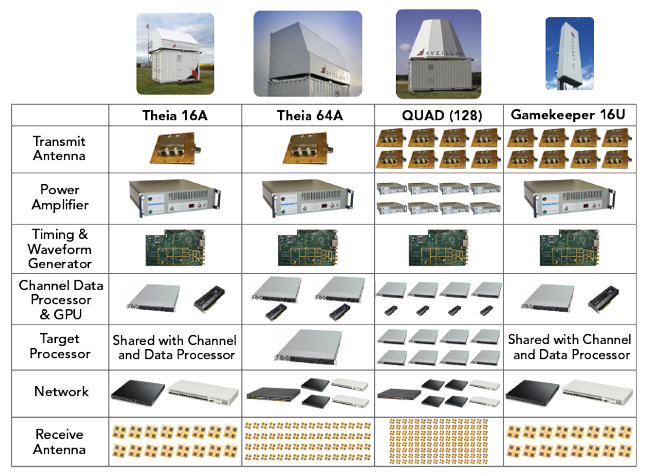
Figure 5 Radar family based on the reconfigurable design approach.
TECHNOLOGY ENABLERS
Key enablers for this adaptivity include advanced pulsed waveform control and state-of-the-art processors. Advanced pulsed waveform control is essential, given that the electromagnetic spectrum is congested, particularly in areas around airports and urban areas. Thus, radar transmissions, particularly those providing new capabilities, are highly controlled. This objective is more easily achieved using a staring radar architecture, versus other array antenna architectures, as the staring radar contains just one independent, easily accessible transmit channel. Transmitter and waveform control properties include:
- Linear, solid-state power amplifiers. At L-Band, COTS units using LDMOS transistors are readily available. They provide several kilowatts output power and greater than 50 dB gain with gain flatness less than 1 dB, which simplifies interfacing.
- Programmable and adaptable, high dynamic range pulse-shaping circuits. Implementations include circuits based on calibrated vector modulators or combinations of controllable phase shifters and attenuators. Using FPGAs, these circuits adjust transmitted RF amplitudes to accuracies less than 1 dB and phase to within 2 degrees approximately every 10 ns.
- Calibration networks, with all receivers continuously evaluating transmitted waveforms. These passive networks split a coupled version of the transmitted waveform and route it to the input of each receiver element during designated calibrated periods. The signal is analyzed real-time to ensure consistent performance. Passive splitter networks and cable distribution networks have high stability in both phase and amplitude over their lifetimes and operating temperature ranges.
- Full synchronization and adaptive control of transmitted waveforms and receiver modes. Programmable waveform generators and processing in each receiver element module (using FPGA and Zynq SoCs) enable rapid adaptivity. All processors are synchronized to an accurate timing datum generated at a single source. Adaptivity includes changing the transmitted waveforms and associated matched filters and can include receiver processing modes to adapt to changing requirements or environments.
- High-order filtering of transmitted and received signals, ensuring low interference and susceptibility to adjacent spectrum users. While accurately controlling the transmitted waveforms ensures transmissions are accurately constrained in frequency, to ensure no unintentional transmission, the transmitted RF signals and all local oscillator frequencies require high-order filtering, typically using surface acoustic wave filters. Also, due to high use of the electromagnetic spectrum, particularly at L-Band, to operate in the presence of other users of adjacent frequencies, multiple stages of filtering are necessary to remove interference. High-order receiver filtering is required before the low noise amplifier, to prevent saturation, and at multiple stages within the receiver, to minimize the likelihood of interference affecting performance. Using this design methodology, signals at just 40 MHz separation from the holographic radar’s center frequency are attenuated by 120 dB.
- Low gain receiver antennas and IF digitization, enabling adaptive interference monitoring and cancellation. A low gain receiver antenna reduces the risk that in-band and adjacent frequency systems will saturate the front-end of the receiver. Antenna gain is provided by digital beamformers which can be configured to place deep nulls in the directions of interference sources. If moving, this is performed adaptively. If digitization is performed using digitizers operating at sample rates many times the radar’s bandwidth, which enables perfect quadrature down-conversion (i.e., no image frequencies) and the ability to sense returns over much greater bandwidths. Digital decimating filters are typically employed in digital down-conversion; adaptive digital filters can be used to minimize sources of interference at any adjacent frequencies within the digitized bandwidth.
The use of state-of-the-art processors has enabled significant developments unbounded by the limitations of processing performance. Key aspects of the processing architecture include:
- Processors with supported, clear development roadmaps, enabling future upgradability. Typically, these are supplied by the market leaders, such as Intel for general purpose processing, NVIDIA for GPUs and Xilinx for FPGA and SoCs.
- Expandable processing architectures compatible across the product line. Initially, range processing is performed at the element level, which is then followed by beamforming processing. Algorithms are configured so that different bands of ranges or angles can be processed in isolation by different processors, enabling division of both processing resources and data. This capability is facilitated using a combination of high bandwidth network switches and lossless data compression at key data communication interfaces.
- Use of FPGAs and Xilinx Zynq SoCs to provide critical timing functionality and high rate element level processing. For example, these devices perform down-conversion of signals in approximately 100 MHz sample rate data streams with sub-ns timing; they also provide flexibility to meet the needs of multiple applications.
- Use of GPUs for element, antenna array and raw array signal processing. GPUs are ideal for common signal processing tasks at high processing rates, so they are effective performing the high data rate radar signal processing for beamforming, Fourier transforms and detection.
- Server-class processors for conditional processing, general purpose processing and interfacing to other systems. These processors are used for operations such as tracking and recognition.
Examples of further development include:
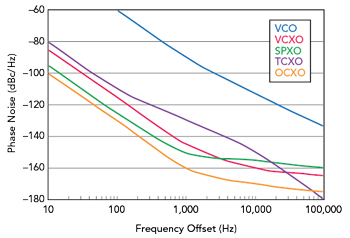
Figure 6 An OCXO enables low phase noise and improves detection of small targets in high clutter.
- Innovations to reduce the radar’s overall phase noise, to enable detection of smaller targets in the presence of high clutter. Ovenized crystal oscillators (OCXO) provide cost-effective, low phase noise: the latest devices have provided a 100 MHz reference frequency to the radar with -160 dBc/Hz phase noise at 1 kHz offset (see Figure 6). Further improvement is achieved by developing filters in frequency multiplication circuits to improve the phase noise at higher frequency offsets.
- Numerous improvements in tracking and target recognition, to use the benefits of operating in a staring radar configuration. As an example, machine learning is used to determine the difference between a bird and a drone, judging their respective track kinematics and the properties of their micro-Doppler signatures.
- Adaptive beamforming, to improve the sensitivity in the presence of high static and dynamic clutter. Holographic radars are used in high clutter environments, such as airports and urban areas. Given the natural sidelobes of planar antenna arrays are high compared to a parabolic antenna, static and dynamic clutter (e.g., road vehicles) can obfuscate targets across a radar’s entire field of view. Adaptive techniques have been developed to identify regions of high clutter and generate beam patterns with nulls in these regions, to reduce the impact of clutter across the entire field of view, significantly improving detection sensitivity in affected environments.
- Techniques to enable multiple radars to coexist using the same frequency channel without interference. This development uses waveform and processing schemes and implements synchronization and frequency locking circuitry between radars to provide a common pulse timing reference and identical frequency reference.
THE FUTURE
Like the challenges offered by the proliferation of windfarms and drones in the medium- to long-term future, concepts of modular staring radar architectures will be adaptable to emerging sensor needs. In the shorter term, the development of variants with extended coverage, higher power and higher sensitivity against drones are planned. System developments will improve discrimination and overall installed performance, which are essential to reducing the operator burden of security systems. Development plans include implementing concepts such as deep learning, adaptive cognitive techniques and frequency and polarization diversity.
Holographic radar is integral to the development of non-cooperative sensing concepts for unmanned traffic management systems, which will enable drones to operate safely in the lower airspace environment, unlocking their potential. Initial concept development and experimentation has begun as part of the National Beyond visual line of sight Experimentation Corridor initiative. This will grow to meet future needs for ubiquitous sensing, broad area and localized generic sensing for applications ranging from security to environmental monitoring. This need to improve coverage while maintaining accuracy is unlikely to be met by increased radar power and sensitivity, rather by sensor proliferation. In the near future, multi-site and multi-static holographic radar (polygraphic) operation is inevitable.
References
1. “THEIA 16A Windfarm Tolerant Radar,” AVEILLANT Ltd., Web: www.aveillant.com/products/theia16a/.
2. “GAMEKEEPER 16U Counter-UAS Radar,” AVEILLANT Ltd., Web: www.aveillant.com/products/gamekeeper/.