
In part I, the economic case from the network operator’s perspective was reviewed and it was found that as operators improve their residual BER performance, their market space is expanded from simple voice applications to e-commerce transactions and other data traffic which demands ultra low error rates. Next, the residual BER performance was found to be primarily a function of the combination of the radio system’s sources phase noise and the power amplifier (PA) nonlinearity impairments.
A Gaussian symbol distribution resulting from random noise was statistically related to the probability of a symbol error using σ, the standard deviation. This was refined for the phase noise specific case by the realization that the RMS phase noise, integrated over the appropriate limits, is equivalent to the standard deviation. Thus, it is possible to characterize and account for the phase noise impairment’s effect on the symbol error rate, one of the two primary influences on residual BER. Now nonlinear distortion is considered and a system budget is constructed to examine the cost considerations associated with residual BER budgeting.
Nonlinearity Distortion
Having reviewed quadrature amplitude modulation (QAM) digital radio concepts, a basic noise model and the extension of that noise model to phase noise, let’s now examine nonlinear distortion as it applies to residual BER. As with the noise case, common nonlinear models will be reviewed first. The ones best for solving the problem of predicting residual BER will then be isolated.
Commonly used linearity metrics are two-tone intermodulation distortion (IMD) testing and amplitude modulation to phase modulation conversion testing (AM/PM). Two-tone IMD testing is a scalar measurement that is based on the internal mixing of harmonics generated in the device at high powers. It is indirectly related to BER and has long been used as a figure of merit. Unfortunately, correlation studies of BER vs. IMD have shown correlation as low as 85 percent, making system residual BER performance uncertain. Despite the inaccuracies of IMD, it has traditionally been the test for linearity characterization (mostly because of the perception of lower equipment costs).
AM/PM testing is a vector measurement typically requiring a vector network analyzer (VNA). It is based on measuring a relative microwave phase shift as power is increased. AM/PM is directly related to the BER mechanism and is an analytical part of the residual BER system budget. Recent decreases in the cost of vector network analyzers now make AM/PM measurement less expensive than IMD measurement and it is gaining popularity as a more modern test.
So which linearity test is best for QAM? AM/PM has the distinct advantage of being the best choice for high quality of service (QoS) systems where residual BER is of importance. Let’s examine why AM/PM is the measurement of choice.
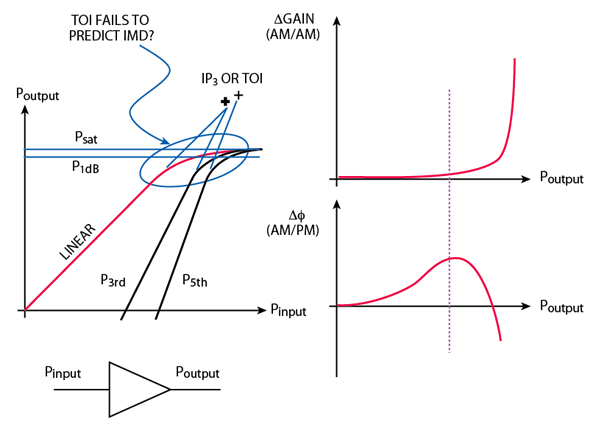
At low power levels, amplifiers exhibit a linear behavior, such that small signals are amplified by a fixed amount of gain. Given some power input, the amplifier is said to behave linearly if the power output is a fixed ratio larger. As the input signal grows larger, a point is reached where the output signal will stop getting bigger and the amplifier is said to be saturated. The linear relationship between input and output no longer exists. Many measurements have been devised to characterize this phenomenon.
Gain compression is a term used to describe the difference between the saturating amplifier’s performance and the theoretically ideal performance. The so-called P1dB is a measure of the output power at 1 dB of gain compression.
Two-tone intermodulation (IMD) is a measurement designed to predict the amount of unwanted modulation energy created by the nonlinear saturation process. It measures the third- or fifth-order intermodulation products. A third-order intercept point can be calculated from the third- and fifth-order products, which is helpful in predicting the level of intermodulation distortion.
Though commonly used, none of these linearity metrics is ideally suited for predicting the residual BER because PAs are operated in a region where an abrupt change in device linearity occurs where IMD and the third-order intercept (TOI) point measurements fail.
To predict residual BER, linearity metrics that directly relate to the QAM vector in amplitude and phase are needed. Gain compression, or the difference between the ideal linear gain and the actual gain, is an amplitude modulation due to amplitude modulation conversion (AM/AM).
Amplitude and Phase Distortion
As the power is increased, the phase delay through an amplifier begins to change as it nears saturation. This change in phase shift as the power is increased or modulated is AM/PM modulation. As will be seen later, this modulation is additive to the QAM vector. AM/AM and AMPM are unwanted modulations that affect the accuracy of where the symbol point position on the constellation falls.
The two graphs of Figure 1 show the distortions in relation to each other (that is with the same power scale). Note that significant phase shifts occur before significant amplitude shifts appear. Typically, only a few tenths of a degree of AM/AM occur while several degrees of AM/PM have built up. The QAM modulation is much more sensitive to the AM/PM distortion and a few degrees of distortion are quite significant, whereas 0.1 to 0.3 dB of AM/AM has little effect. This phenomenon allows a key simplifying assumption that AM/AM is a secondary effect and can be ignored in the analysis.
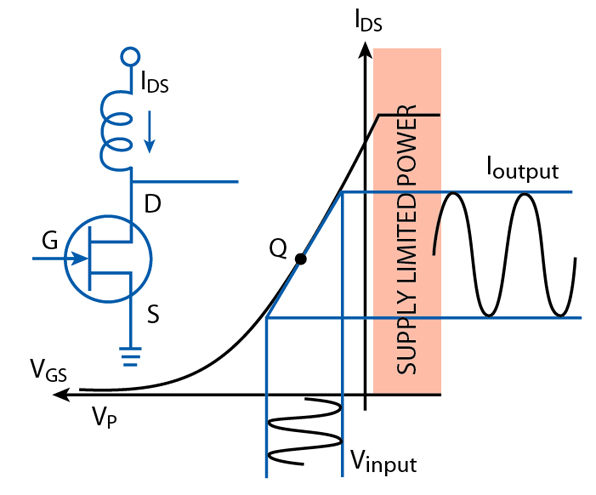
Sometimes it is helpful to review the mechanisms that actually generate these unwanted distortions in the power amplifier, providing insight into the controlling factors. The simple GaAs MESFET model, shown in Figure 2, will be used to illustrate the principles. To keep it simple, the effects of microwave matching circuits that are of finite bandwidth and linear in nature are omitted. The GaAs FET voltage-to-current characteristic behaves as a square law device. If driven with a small signal input voltage, the current is modulated about the Q point on the output. Typically, most QAM microwave power amplifiers are built from class A designs for maximum linearity.
The raw DC power supplied to the FET to establish the Q point must be limited to constrain the device’s operating temperature. Minimizing the device’s operating temperature slows the semiconductors defect migration to assure a long operating life.
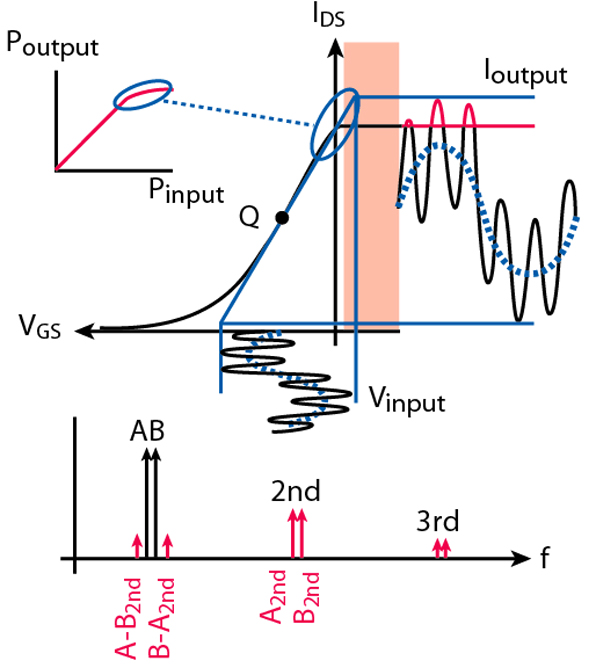
Next, let’s see how AM/AM and AM/PM IMD products are created in the device. In a two-tone IMD test, identical amplitude tones separated slightly in frequency are injected into the input of the amplifier. The power supply cannot deliver additional current so the superimposed sine waves are clipped. This gives rise to second, third harmonics, etc., which mix together forming the IMD products, as illustrated in Figure 3. This mixing action actually takes place in the device junction and often the harmonics are substantially attenuated by the band-limited output matching networks. Thus, it is often not possible to directly compute the intermodulation products using the measured harmonic power for microwave amplifiers. However, it is a simple process to measure the relative attenuation of the IMD products with a spectrum analyzer.
Does saturation really produce such an abrupt clipping of the two sine waves? Well, that depends very much on the particular FET and how it is biased. Forward gate rectification can be very abrupt, while pinch off or the square law curve are much more subtle saturation characteristics. Hence, the amount of harmonic energy available to be converted into intermodulation products is very dependent on the abruptness of the nonlinearity. Here lies the major problem with using IMD to predict BER from correlation studies. The IMD measurement is just a single point on the POutput vs. PInput curve and only predicts linearity for small signal characteristics, but QAM modulation operates over a range of vector amplitudes near saturation that include abrupt changes in linearity.
The AM/AM mechanism is very simple to examine with the amplifier model. If a single sine wave is fed to the amplifier and the power source cannot supply the necessary current, the amplitude is clipped, resulting in a reduced output. This reduction is gain compression or AM/AM. AM/AM is easily measured with either a source and spectrum analyzer or a network analyzer.

The phenomenon that gives rise to AM/PM again begins with the power source limitation creating a clipping or mushing of the waveform. Since the top of the waveform is not correctly amplified, the average value or zero crossing is offset from the original position. This offset in zero crossing occurs where the sine wave has finite slope creating a phase shift in the output signal.
It is interesting to note that if the input signal is increased still further, clipping on the bottom of the sine wave would occur as the output begins to resemble a square wave. Clipping at both ends causes the average offset to come back towards that of the original sine wave; hence, the characteristic rise and fall of the AM/PM curve. The AM/AM and AM/PM mechanisms are illustrated in Figure 4. It is also important to note that the microwave matching circuits strongly affect the impedance, hence the voltage and current relationship, as well as the clipping on the output of the device, are affected.
The AM/PM phase shift as a function of signal amplitude or vector length distorts the ideal symbol location of the QAM symbol constellation, as shown in Figure 5. Outer symbols have the largest vector length and suffer the most AM/PM distortion. AM/PM testing is typically done with a CW sine wave (though it is possible and even necessary to occasionally measure it with a modulated signal and vector signal analyzer (VSA)). This is an important fact because it relates a CW parametric test to the actual distortion impairment of the QAM symbol constellation.
The ability to relate a parametric analog test to the actual error mechanism provides the means to predict digital error rates from traceable standards. So how does one relate the vector length to known traceable standards? And what range of vector lengths do we need to measure the distortion? What do the power meters used to setup the transmit power actually measure? A power meter measures the RMS CW or modulated power. Testing AM/PM with a CW source requires relating the average modulated power to the average CW power.
Modulated Power Levels
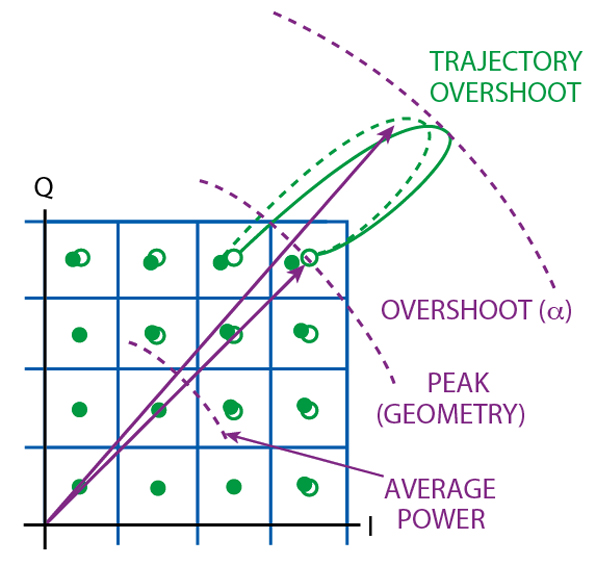
At first glance, the constellation geometry can be used to calculate the RMS vector length. However, the worst-case AM/PM occurs at the longest vector length or highest peak power. Calculating the peak-to-average ratio from the constellation to correct the measured power is an important step in determining what CW test signal power is necessary for AM/PM testing.
A peak-to-average power correction is only one part for determining the highest power at which to test AM/PM. In between symbol states the vector overshoots the boundaries of the constellation. The so-called ‘overshoot power’ or ‘trajectory power’ represents the longest vector length. Though understood, the overshoot phenomena is beyond the scope of this tutorial, so let’s simply say that it is a function of baseband filtering α.
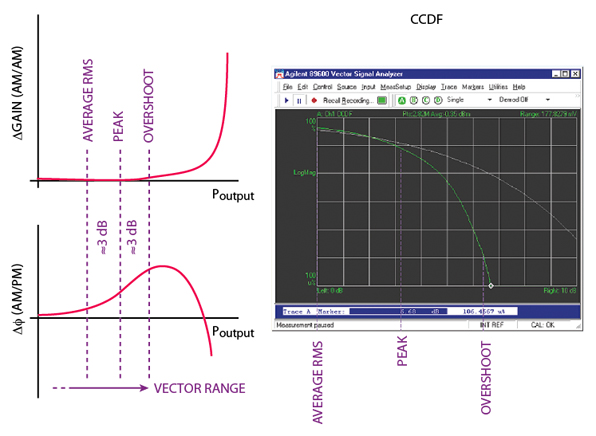
What test conditions are necessary to properly characterize the distortion of the power amplifier? The gain and phase distortions need to be characterized over the range of modulation powers. This means that AM/PM should be tested from the smallest vector needed to produce the modulation to the largest vector (including overshoot), or in other words, over the vector range. Correction factors for peak-to-average and overshoot powers, typically about 3 dB each, must be added to the average power to come up with the overshoot power. Similarly, minimum-to-average power can be subtracted from the average power to determine the lowest power required. In practical terms the low power limit can be set to where no appreciable AM/PM modulation is observed, eliminating the need to calculate minimum to average.
The important thing is that the amplifier’s linearity is actually measured at the overshoot power where the distortion will be the most significant. Testing at average power (what the power meter measures) would be very misleading. One approach to determining the appropriate vector range is to measure the complementary cumulative distribution function (CCDF) of the modulated signal. This VSA test shows the overshoot or trajectory vector length, as shown in Figure 6.
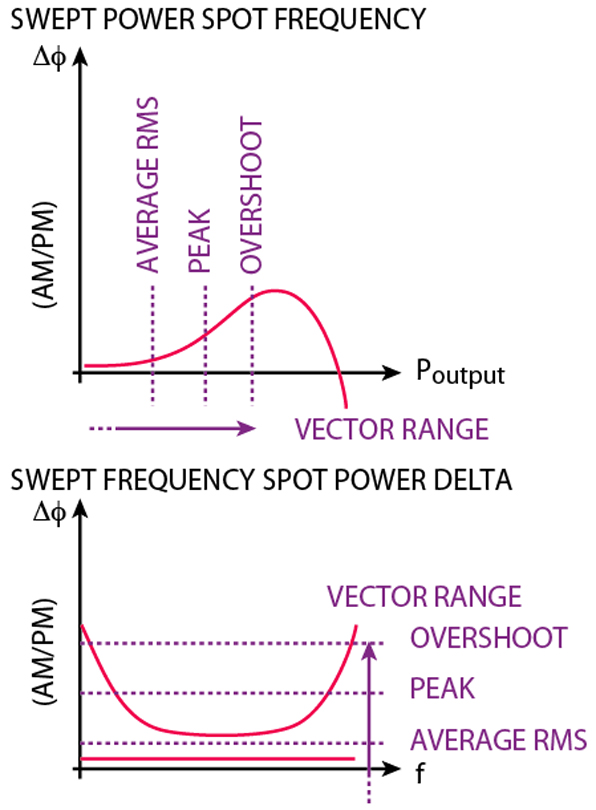
There are two types of AM/PM measurements, spot and swept. The classical diagram of AM/PM or ΔΦ versus power level, often seen in linearizer work, is a spot frequency versus swept power measurement. This measurement is best suited for fixed frequency operation since the matching, hence AM/PM, is usually a function of frequency. Another approach is to use a swept frequency measurement at a spot power delta. This measurement is best suited for broadband devices that operate over a range of frequencies. It requires the assumption that the AM/PM increases monotonically over the power range of interest, which is virtually always the case for QAM signal amplifiers. These two approaches are shown in Figure 7.
The swept frequency AM/PM measurement requires the PA output power to be calibrated across the band of interest at a low power (power cal). Next, the phase is calibrated to zero with the PA in place (since this is a relative measurement). Finally, the power is increased to the overshoot power and the AM/PM across the band can be observed. AM/PM measurements must be done quickly to avoid junction-cooling effects that influence the accuracy of the measurement. If it is not possible to make the measurement quickly, the more complicated complex stimulus/response method is required. Often, the author has found that QAM amplifier designers optimize their designs for maximum saturated power out or lowest IMD at high power. Power amplifiers used in high QoS links should be optimized for minimum AM/PM over the vector range across the band of interest (swept frequency, spot delta power).
Composite System
Now that some of the basic principles behind QAM digital radio, a phase noise probability model and nonlinear elements have been reviewed, some of the mathematics necessary to combine them as well as the assumptions and approximations involved will be considered.
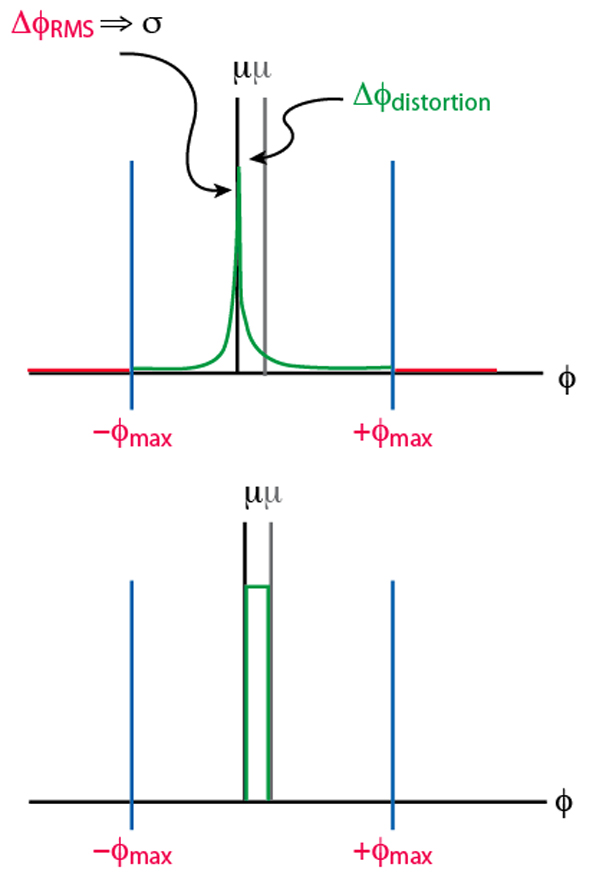
Distortion is directly additive to the noise because it operates on the vector itself. This has the effect of offsetting the mean value of the probability density function (PDF), as shown in Figure 8. Distortion by itself has no error probability density function — it is purely deterministic. At first this might seem counter-intuitive, but it requires the randomness of phase noise to create random dribbling errors. What if the distortion was so large that the sample point fell beyond the symbol boundary? It would make an error, but without noise it would always make the same error in a deterministic way (non-varying BER). This does not happen because there is always noise present.
Residual BER is a function of both the power amplifier linearity and the phase noise of all the sources in the system. This is a very important point, for there is often disagreement over whether the PA or one of the sources is to blame for dribbling errors. The answer is that they both influence the error floor and only a judicious allocation budget (usually based on implementation cost) can sort out which element is bringing the system down.
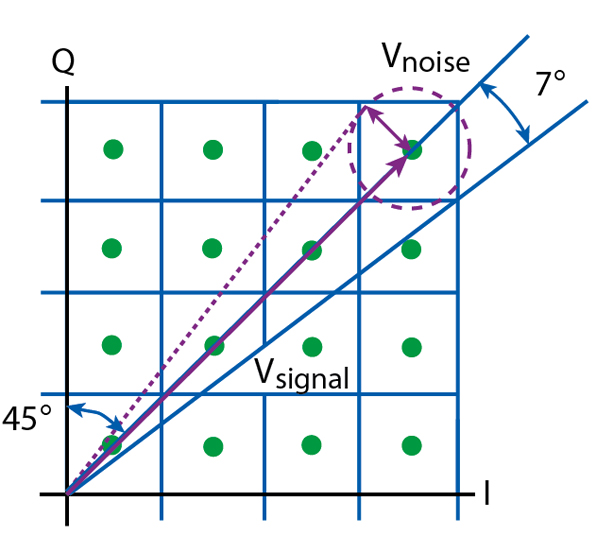
The system phase noise can be represented by a noise vector, which adds geometrically to the desired modulation vector, as shown in Figure 9. Noise from more than one source can be added geometrically to obtain the total noise for the system.
The sources in the modem and the conversion process all contribute to the overall system phase noise. Thus, residual BER is a function of both the modem and RF sources. Both transmitter and receiver sources affect the residual BER. These are very important points. It is not possible to evaluate the system residual BER without both the modem and the RF. Likewise, it is not possible to evaluate the system residual BER without both the modulator/transmitter and receiver/demodulator. This means that loop-back testing to exonerate the modem from dribbling error problems is not a valid approach. In addition, most golden transmitters and golden receivers are not valid for testing residual BER. Only golden units with sources and amplifiers that have worst-case phase noise and distortion can be used for testing residual BER (a difficult proposition to construct).
Remember not to use golden modems or wireless outdoor units (ODU) as part of a production process when measuring residual BER. The golden modem, or golden ODU, with its better than worst-case performance, can easily mask other problems in a radio chain, causing a unit passing in production tests to dribble errors during operation in the field. High QoS systems require parametric testing of the primary phase noise and distortion components to guarantee consistent interchangeable part performance. The QAM symbol constellation has some important geometric effects to consider. The outer symbol points can tolerate the least angular error. In the 64 QAM constellation, the outer most point can tolerate a maximum of 7.7° of error before making a symbol decision error versus the inner most point, which can tolerate 45° of error. The outer most point also has the longest vector length and corresponding highest angular distortion. The maximum angular error is symbol location dependent, but the phase noise is a constant for all symbol points. Thus, the number of sigma to the boundary is dependent on the symbol location, with the outer symbols having the fewest sigma to the boundary.
The error probability of each symbol must be weighted, based on the probability of symbol occurrence. Usually, symbols are equi-probable and symbol boundaries are setup on a simple grid pattern. There are some QAM modulations where probability of occurrence and grid patterns are not so simple (usually to take advantage of the fact most errors are made on the edge of the constellation) and this must be taken into account in the system model.
The model development of residual BER focuses primarily on the source’s phase noise and the power amplifier AM/PM distortion. These key components usually represent the greater part of the residual error budget and are often responsible for the vast majority of the cost of the radio. There are other secondary contributors to the error floor, including group delay distortion or inter symbol interference (ISI).
In most cases group delay distortion is not a significant factor largely because of the tremendous power of modern digital equalizers. It is useful to be aware of its effects to minimize the equalization required for static filter effects and to maximize the equalizer’s performance for dynamic channel fading. In some burst systems, where equalizer performance is limited, group delay distortion should be taken into account.
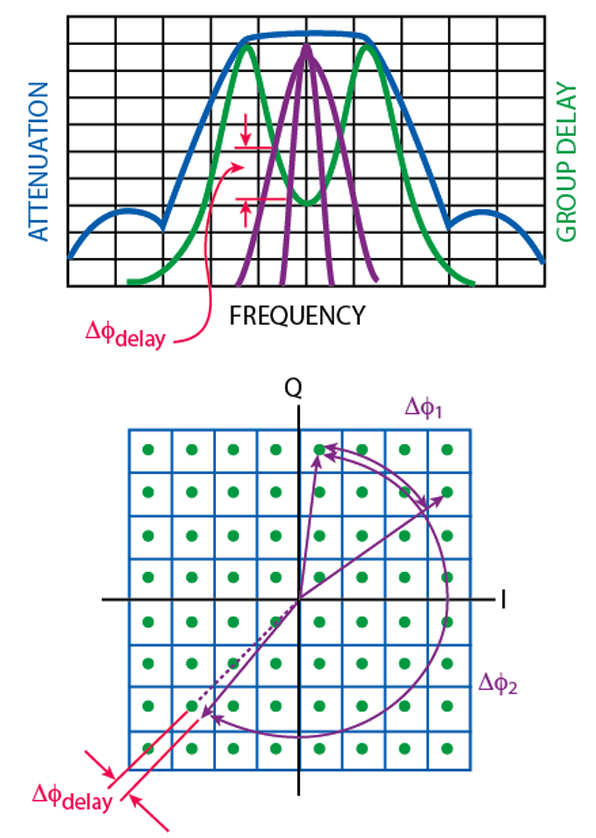
There are many other secondary contributors to the symbol error mechanisms. In this simple model, they are assumed to be insignificant, which in practice is usually the case. Filters introduce group delay into the modulated channel. The spectral energy associated with a change in phase is dependent on the magnitude of phase modulation. Small changes in phase occupy small bandwidths; large changes in phase occupy larger bandwidths. The delay difference associated with the two spectrums produces a phase error on the modulation vector, as shown in Figure 10. This error is based on the previous symbol sequence and is another way of looking at intersymbol interference (ISI). Fortunately, for most modern digitally equalized radios, the equalizer reduces this error to an insignificant portion of the residual BER budget and can be ignored.
There are many approaches to measuring the different error mechanism types. Among the most popular are noise figure analyzers (NFA) for random noise characterization, spectrum analyzers (SA) for phase noise integration (high performance applications require phase noise test sets) and vector network analyzers (VNA) for AM/AM and AM/PM measurement.
Delay distortion can be measured either with a VNA or a vector signal analyzer (VSA). VSAs also excel at identifying spurious interference with tools like error vector spectrum.

At this point the question is why not use error vector magnitude (EVM) measurements to estimate BER versus separate AM/PM and phase noise measurements? Let’s examine two scenarios, one with a lot of phase noise and little distortion and one with little phase noise and lots of distortion, as shown in Figure 11. Which has the lower BER? Which has the lower EVM? The one that has the least number of sigma to the boundary will have the highest BER, hence the high phase noise example will have high BER (case I, σ = 1.2 vs. case II, σ = 2.0). If the RMS phase noise and distortion components are added both scenarios have 6°. They have the same EVM, which is a summation of effects. It does not differentiate between random effects, which add geometrically and possess probability densities, from distortion effects, which add directly and are deterministic. EVM is useful because its characteristics can tell us something about the nature of the problem or where the signal was degraded, but it cannot be directly related to BER, the acid test for the network operator. EVM must be decomposed into the different types of error mechanisms, so the appropriate mathematics (statistical or deterministic) can be applied to relate those components to BER. However, the characteristics of the error vectors themselves can provide tremendous qualitative insight to the trained eye when it comes to diagnosing problems.
Example System Budget
Let’s review an example residual BER system budget to try and pull all these concepts together into a practical technique. The goal is to predict the residual BER of a 64 QAM radio design by assignment of phase noise and AM/PM performance. The first step in predicting residual BER is to calculate the symbol vector lengths for every point in the constellation. Using symmetry simplifies the work by only requiring the computations for a single quadrant. Second, the maximum possible phase error for each symbol is calculated. Third, the phase noise and distortion components are allocated on a trial basis. Fourth, the symbol error probability and BER are calculated from the normalized probability density function. If the results are unacceptable, reallocation of the phase noise and distortion components must be repeated until the desired results are achieved. Finally, once the desired residual BER has been achieved, the phase noise and distortion allocations must be subdivided across the system.
Let’s see how this procedure works with some real numbers. First, using the Pythagorean theorem, calculate the magnitude of each symbol vector in the constellation. Using symmetry the work can be simplified by only calculating a single quadrant.

The peak symbol magnitude, or in some cases magnitudes (128 QAM), can be determined. Summing up each vector and dividing by the total number of vectors gives the average vector length. The peak-to-average ratio can be calculated by dividing the peak symbol vector by the average symbol amplitude. The peak-to-average ratio is usually expressed as a twenty-log ratio so the power variation due to the constellation geometry can be assessed. The peak-to-average ratio expressed in decibels is also used in conjunction with the trajectory overshoot to determine the correct maximum power to test AM/PM conversion. In practice, however, it is usually best to measure the CCDF to determine the overshoot power rather than attempt to calculate it.
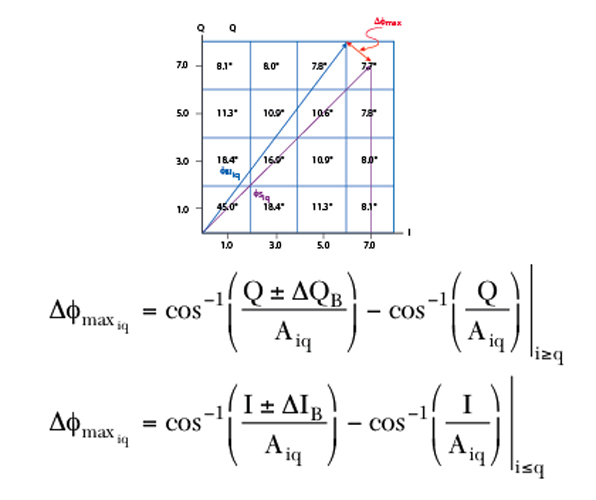
Using the constellation geometry, the maximum permissible phase error to the symbol boundary can be calculated. It begins by calculating the angle to the symbol point (φiq) using an arc cosine relationship and realizing that the symbol vector length previously calculated is the hypotenuse of the triangle, as shown in Figure 12. Similarly, the angle to the symbol boundaries (φB1iq and φB2iq) can be calculated by adding or subtracting the distance from the symbol point to the boundary and then using the arc cosine relationship. Two equations are necessary depending on where the symbol point is located in the constellation. Symbol boundaries are intersected either on the horizontal axis, vertical axis or on both axis (diagonal) with angular rotation of the vector. Subtracting the symbol point angle from the boundary angle gives the maximum angular error permissible (ΔφMax) before an incorrect symbol is detected.
An important simplification can be made by assuming that the clockwise and counter-clockwise maximum angular error (ΔφMax) is the same. Alhough these angles differ slightly, the small difference can easily be neglected.
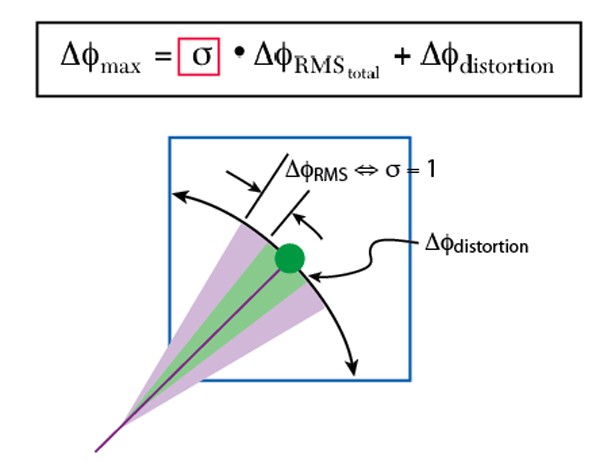
The geometry of the constellation locks down the maximum angular error (ΔφMax). The angular error is composed of a distortion component and some number of sigma times the phase noise component (neglecting other possible error sources, which is generally a good assumption), as shown in Figure 13. Next, an allocation of the distortion component and phase noise component must be made. Proper allocation between distortion and phase noise can have a significant impact on the overall cost of the system. This cannot be understated, of course, because these allocations affect the performance requirements of the sources and power amplifier, the most costly parts of the radio (typically 60 percent of the overall cost). This is where true system expertise and a sound budget really pay off.
Though it is beyond the scope of this article to delve into the economics of the allocation (this topic should be relegated to the experienced system engineer), a couple of guidelines may be helpful. High QoS systems requiring fiber-like error rates generally require seven to eight sigma making the total phase noise requirement around 10 percent of the maximum angular error. The distortion allocation is usually lowest cost, just below 50 percent of the total maximum angular error. As the frequency increases, the 20log(N) multiplication of phase noise favors more of the budget being allocated to phase noise. A typical allocation for the 64 QAM example of 3.000° of AM/PM distortion and 0.600° of total RMS phase noise is assumed.
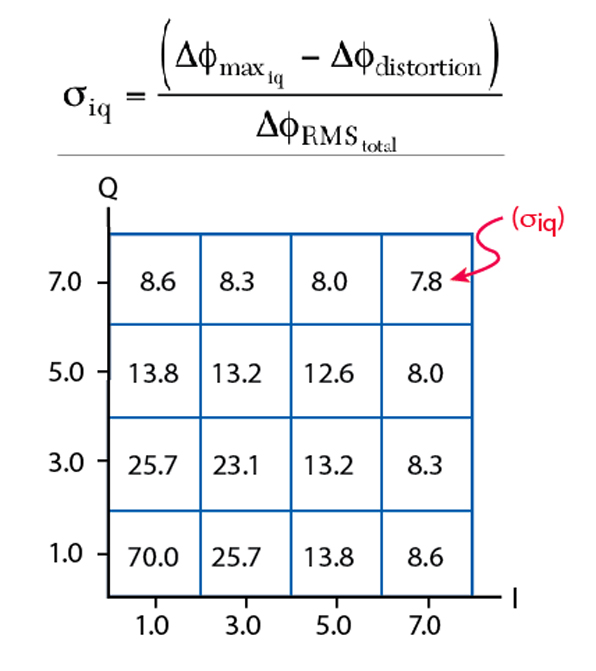
The previous equation can be solved for sigma (σiq) for each of the constellation points. It can easily be seen in Figure 14 that the number of sigma to the boundary is much lower for the outer states than for the ones close to the origin. This means that virtually all the residual errors occur in the outer most symbol points.
An important simplifying assumption has been made in the standard deviation calculations. It is assumed that the distortion and noise components are symmetric about the center of the symbol point and that accounting for the differing number of sigma to the boundary has been neglected due to the fact that AM/PM has the effect of offsetting the mean in a single direction. At first glance this may seem like a gross approximation, but in practice it results in relatively reasonable errors for a couple of reasons. In the case where there is almost no distortion, true symmetry does exist. In the case where distortion is large, a single tail of the pdf dominates and the model is off by a factor of two. A factor of two may seem large, but usually when BER is evaluated, the concern is the exponent, not the precise number (rarely does it matter if it is 1.0 x 10-12 or 2.0 x 10-12; it is more important to know if it is 102 versus 10–8). If the application requires that extra precision, it is necessary to have two separate tables, one to account for clockwise boundary errors and another to account for counter clockwise errors.
Simplifying Assumptions
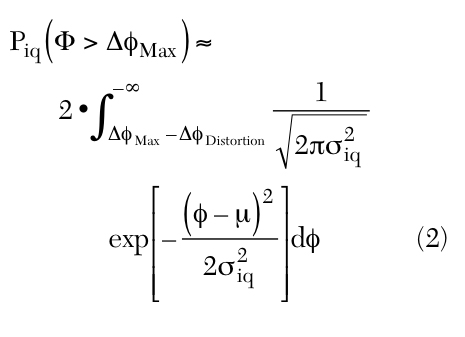
The number of sigma to the boundary enables the use of the normalized pdf to calculate the probability of each symbol error (Piq).
The integral of the pdf has no closed form solution, but there are both tables and spreadsheet functions such as NORMDIST (×, μ, σ,C), which make it very easy to solve.
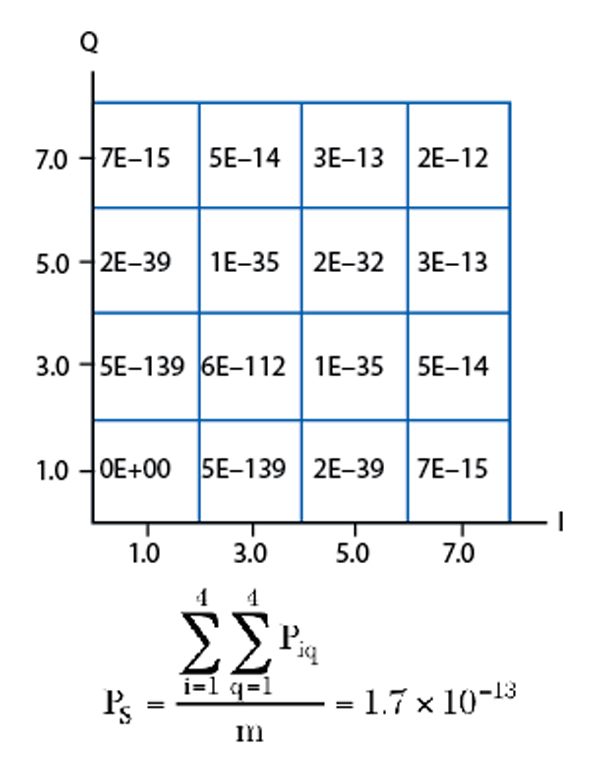
Once the individual symbol probabilities have been calculated, they can be averaged to yield the probability of a symbol error, as shown in Figure 15. In this example, the probability of a symbol error is approximately 1.7 x 10-13. This is quite good and on a par with fiber-optic performance. It is also important to note that this is before forward error correction (FEC), where an additional one or two orders of magnitude improvement could be obtained.
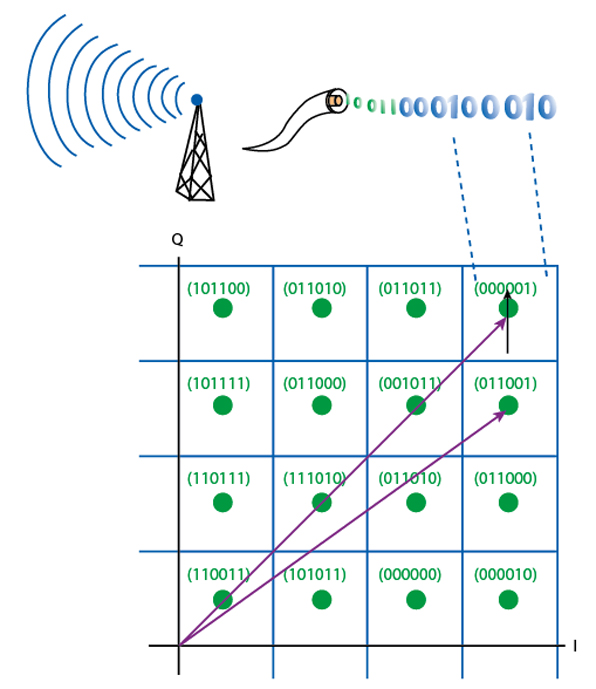
The symbol error probability must now be converted to the BER or probability of a bit error. The conversion of symbol errors to bit errors is bit mapping dependent (that is the arbitrary assignment of six different bits to each symbol in the constellation), as illustrated in Figure 16. Generally speaking, when mapping the bits to symbols, it is important to try to make adjacent symbols differ by as few bits as possible. Ideally, only a single bit differs in the adjacent symbols and a symbol error creates only a single bit error (there is no error multiplication).
The conversion factor between symbol errors and bit errors is typically low. Again, the focus is usually on trying to access the order of magnitude rather than the specific number for high QoS systems. Thus, in practice, with most bit mappings, it is usually a close approximation to assume a symbol error results in a single bit error. The symbol error probability calculated is usually a close approximation of the BER. If the calculated BER is acceptable, no reallocation of distortion or phase noise is necessary. The final step is to subdivide the total allocation into the components of the system that generate it.

In the case of phase noise, the example system has six different sources, which must total up to the 0.600° allocated (see Figure 17). Recalling that noise adds in an RMS fashion, each of the source’s integrated phase noise is geometrically summed to add up to the 0.600° allocated. Again the system engineer chooses the phase noise requirement of each source to minimize cost. The key consideration is the 20log(N) relationship of multiplied noise (high frequency sources tend to have more noise than low frequency sources).
A similar subdivision of the distortion budget can be made, but to a lesser extent. It is generally wise to reserve approximately 10 percent of the distortion budget for secondary effects such as incompletely compensated group delay and PA power leveling. The skill of the system engineer in making the right allocations and subdividing the budget into practically realizable values significantly affects the cost and competitiveness of the radio system.
The quiz presented at the beginning of the first part of the article to illustrate some important points will now be revisited. Radio dribbling errors (small numbers of errors scattered across time, versus a large single burst of many contiguous errors) at normal received signal levels is a classic sign of a residual BER problem.
• A digital radio dribbles errors, the modem is then looped back on itself and is error free. Therefore, the RF must be bad – False.
The modem loop-back test is of little value for residual BER because the major contributors to the residual error floor (PA, up/down conversion sources) are removed, hence a very unrealistic evaluation of system performance is made.
• The dribbling radio’s PA is swapped into an error free radio link, which then begins to dribble. The PA is thus the cause of the errors – False.
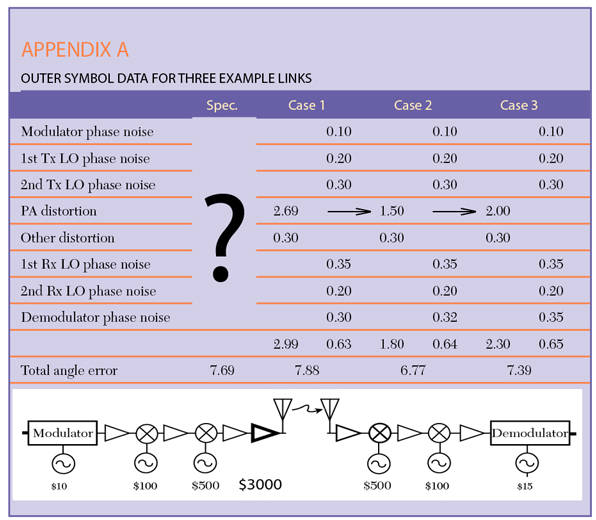
The technician is often convinced in situations like this that because the problem follows a specific PA, that PA must be the cause, but often it is not. The residual BER is a function of all the phase noise sources as well as the distortion sources. It is the total that matters, thus the only way to identify which element is at fault is to establish a worst-case maximum budget for each contributor and then test them independently. Appendix A shows the outer symbol angular data for three example links.
In the example, the T/R link shown in case no. 1 exceeds the maximum angular error, causing it to dribble errors at an unacceptable rate. Again, technicians suspect the power amplifier in situations like this. Indeed, if the PA of case no. 1 is swapped with the PA of case no. 2, a radio that is working fine, link no. 2 will begin to dribble errors (note that most of the numbers are the same). Similarly, the link of case no. 3, which starts out okay, will also begin to dribble errors when the technician swaps the PA from case no. 1 for the PA of case no. 3. The technician is now convinced in situations like this that because the problem followed the “bad” PA, it must be the cause. As a result a $3000 PA gets put to the side as scrap.
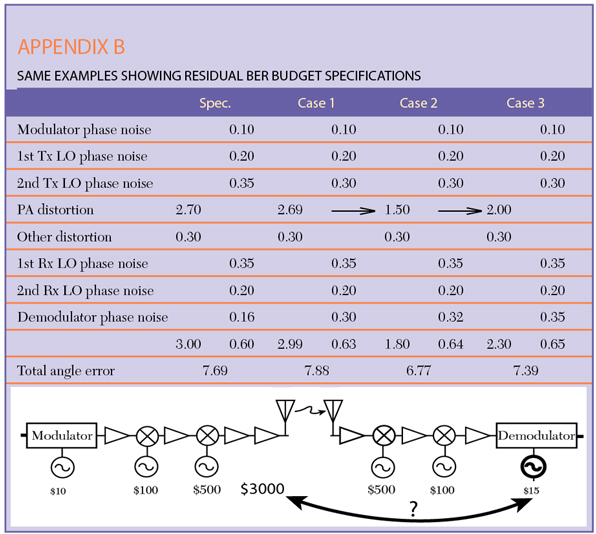
But are all those PAs really unusable? Actually, they may be fine. Consider Appendix B, where a system residual BER budget specification (shown on the left), has been constructed . Notice that if the crystal oscillator from the demodulator in case no. 1 had met its specifications, then link no. 1 would perform fine with the original PA.1
The author has encountered this exact case in two different companies where the cost of the modem source was ~$10 versus the ~$3000 for the PA. Said another way, improvements in the PA would cost hundreds or thousands of dollars to make versus improvements in the demodulator source, which would cost pennies. Likewise, system engineers make or break a product’s economic viability when choosing the allocation between phase noise and linearity. A noisy frequency conversion or modem oscillator can make the power amplifier’s cost unacceptable, just as poor PA performance can drive up the cost of an LO frequency synthesizer.
• It is possible with IMD and phase noise to predict if a QAM radio will dribble errors – False.
Many vendors use IMD and phase noise to predict if a QAM radio will dribble errors. This approach is purely empirical. IMD is also a spot power characterization and does not account for the effects of changing compression characteristics as a function of power over the vector range. Worse yet, IMD is often applied just below saturation where its prediction utility is of little value (clipping begins to dominate versus square law curves). While it may seem easy to measure error rates at different power levels and correlate them with IMD measurements, the correlation coefficient can be as bad as 85 percent for 128 QAM. Said another way, 15 out of every 100 radios would fail their residual error count. AM/PM (which is most accurate when clipping begins) and phase noise being analytically related to the BER can calculate the error rate exactly.
• Phase noise has less of an effect than distortion – False.
Often times, dribbling errors focus attention on the PA because it is usually the easiest component to change performance by reducing the transmit power. The PA then seems to have the greatest effect on residual BER. Note, however, the integrated phase noise contribution is multiplied by the number of sigma (σ) required for an acceptable error rate (usually between seven and eight for high quality systems). Thus, changes in phase noise have a much greater impact than changes in distortion. Unfortunately, phase noise usually cannot be adjusted like PA output power, so this sensitivity is rarely observed with practical hardware.
Conclusion
The residual BER budgeting process is a key analysis in producing a cost-effective wireless data link that meets the QoS requirements demanded by the network provider. Using a combination of phase noise and AM/PM distortion measurements, the sources and PA can be characterized to deliver consistent combined residual BER performance, where “golden” modems and EVM techniques cannot.
This article has covered the process for predicting the worst-case residual BER from the analog metrics, which influence it, versus empirical approaches, many of which simply do not work. Accurate characterization of these metrics is an essential part of providing the most system for the money. It is also essential for many new wireless access systems, where high quality service is required with multi-year rollouts of customer premise equipment interfacing to existing base stations (LMDS, MMDS, etc.). The system engineer who judiciously allocates a residual BER budget creates a significant competitive advantage in product cost as well as interchangeability necessary for today’s radio products.
More information on this topic, including a system BER spreadsheet, is available at http://www.tmintl.agilent.com/us/BroadbandSymp.shtml, or contact the author at kent_k_johnson@agilent.com.
Reference
1. K.K. Johnson, “Optimizing Link Performance, Cost and Interchangeability by Predicting Residual BER: Part I — Residual BER Overview and Phase Noise,” Microwave Journal, Vol. 45, No. 7, July 2002, pp. 20–30.