


Figure 1 Visual rendering of a connected vehicle.
The provision of safety, infotainment and convenience services to vehicle occupants via wireless connectivity is a fundamental design consideration for automotive OEMs, not only to meet regulatory obligations, but also as a competitive differentiator in the market. As electric vehicles become more prevalent, consumer purchase priorities are migrating from performance-oriented criteria to the features available to the user, such as remote vehicle access and in-car theatre. This migration is evident particularly as higher levels of autonomous driving are rolled out and the driver becomes less involved in actively driving and more engaged in the consumption of services. Figure 1 shows a visual rendering of automotive connectivity.
OEMs therefore wish to ensure seamless user experience for services and applications, most of which will run in the cloud and be enabled remotely, thereby creating a software-defined vehicle. Currently, these services are primarily delivered via terrestrial cellular networks (TNs); however, the automotive industry faces the challenge that significant coverage gaps still exist, particularly in sparsely populated rural areas in countries such as Australia, Canada and the U.S. Furthermore, in instances of TN infrastructure damage due to conflict or environmental disaster, non-terrestrial networks (NTNs) offer communications resilience. OEMs, government organizations and industry bodies such as the 5G Automotive Association (5GAA) are actively exploring the role that NTNs can have in providing complementary wireless connectivity in areas with limited cellular network coverage. Olaf Eckart, partner manager at BMW Group and NTN Work Item lead at the 5GAA, succinctly expresses the automotive industry’s goal: “No connection is not an option.”
CURRENT SITUATION
The possibility of operational NTNs has emerged due to two fundamental enablers. The first enabler is the number of technical developments and the economies of scale of satellite launchers to deploy the hundreds of low Earth orbiting (LEO) satellites in multiple missions required to form complete constellations. The second enabler is the provision for NTN within the 3rd Generation Partnership Project (3GPP) release 17 (R17) and subsequent releases, which provides a framework for the implementation of NTN and its integration with TNs.
The 5GAA has taken the lead in navigating the path for the automotive industry to adopt NTN. It breaks down the use cases into data rate categories, including narrowband (less than 400 Kbps), such as telephony, road safety and remote services, wideband (less than 10 Mbps), such as fleet monitoring, diagnostics and OTA software updates and broadband (more than 10 Mbps), such as video entertainment and gaming.
Currently, satellite constellations such as EchoStar and ViaSat-Inmarsat are operational and providing connectivity to mobile terminals via IoT-NTN. Satellite company Skylo Technologies currently provides direct-to-device satellite connectivity to over 5 million subscribers using specific 3GPP R-17 compliant, commercially available devices, such as Google Pixel 9 and Samsung Galaxy. Furthermore, Starlink, a satellite internet constellation operated by SpaceX, has more than 300 Gen 2 satellites in space and has started to offer direct-to-device NTN service to LTE smartphones in the U.S. in cooperation with T-Mobile. Starlink also delivers broadband wireless to consumer premises, operating in the Ku- and Ka-Bands using proprietary protocols. However, the signal attenuation caused by a car prohibits in-vehicle operation of the devices. Furthermore, although there have been many positive feasibility announcements by OEMs such as BMW and telematic control unit (TCU) vendors such as Harman and MediaTek, there are no available vehicles on the market today that offer NTN connectivity. The non-availability of 3GPP-compliant LEO constellations operating in S-Band around 2 GHz and compatible with existing automotive wireless connectivity remains a significant barrier.
According to the 5GAA, the first mass deployment of such services in automotive can be expected around 2027. This timing is driven by the long lead times for chip development, integration and validation. Initial automotive services are expected to be narrowband use cases, including safety and fleet management, such as emergency calling and stolen vehicle recovery, implemented within the framework of 3GPP R17. Subsequently, wideband NR-NTN use cases, such as teleoperated driving support and internet browsing, are expected in 2029 within 3GPP R17/18. Finally, broadband NR-NTN use cases, such as high-definition video streaming and cloud gaming, are forecast to start after 2030 at the earliest.
When comparing TNs and NTNs, three fundamental technical differences are apparent. Firstly, there is a significant difference in the wireless connection distance. While typical TN cell sizes are hundreds of meters, LEO satellite sizes can be hundreds of kilometers, and GEO satellite sizes can reach up to 36,000 km. Secondly, the entire network is in constant motion. Thirdly, the carrier frequencies are more diverse, covering L-, S-, Ku- and Ka-Bands. The frequency diversity creates link budget and latency challenges, additional signal propagation fading considerations and tracking and bandwidth requirements both on the vehicle and in the satellite. Furthermore, the operation of NTNs has several extra dimensions compared with TNs, including cell reselection, intra-satellite/inter-beam handover, inter-satellite handover, NTN to TN handover and TN to NTN handover. These extra dimensions present additional design requirements for network architects to ensure seamless mobility, especially where individual LEO satellites are only visible from the ground for a matter of minutes, and the vehicle itself could be travelling at 150 km/hr.
Technology developments required to complement the current TN connectivity of vehicles with additional NTN connectivity depend on the specific frequency band and satellite constellation, as well as the data rate and latency requirements of the use case. These break down principally into changes in the vehicle’s wireless connectivity (TCU and antennas), the in-vehicle network and enhancements to satellite beamforming.
VEHICLE CONSIDERATIONS
The primary module responsible for external wireless connectivity in vehicles is the TCU, integrating cellular, non-cellular and navigational wireless standards including 4G, 5G, C-V2X and GNSS, as well as connecting to the in-vehicle network to enable services such as telephony, video streaming and autonomous driving. For initial implementations of NTN, the TCU will be required to integrate a 3GPP R17-compliant chipset and will be able to leverage its existing 5G radio bands. For example, Skylo is working with Harman, a Samsung subsidiary, to enable bidirectional emergency messaging in vehicles through Harman’s Ready Connect TCU. This allows for emergency alerts and real-time weather updates to be delivered over satellite, which is particularly useful in disaster scenarios if cellular networks fail. However, commercially available NTN-enabled vehicles are still unavailable. Furthermore, support of wideband and broadband use cases requiring Ka- and Ku-Band connectivity will be a step change in radio technology for TCUs and antennas.
The roof-mounted antennas currently used to connect the TCU to the outside world already have the L-Band frequency coverage; however, the radiation pattern is oriented to provide connectivity to terrestrial base stations. Initial studies conducted by the 5GAA indicate that roof-mounted omnidirectional antennas will be sufficient to support S-Band LEO satellites, and this, along with integration of next-generation TCUs, is expected to be the first step in the hardware changes required to implement automotive NTN. However, the more demanding link budget needed to support GEO satellites will require a phased-array antenna to be accommodated within the roof of a vehicle, which presents size, weight and cost challenges for OEMs. This implementation, while possible on a conventional car if an appropriate antenna is developed, is perhaps more practical on a commercial or agricultural vehicle.
In the digital domain, the increased volume of data and more complex processing associated with the adoption of wideband NTN use cases will drive up in-vehicle network bit rates and place increased demands on the digital signal processing executed by domain controllers, zonal controllers and the central processors.
Matthias Kaestner, corporate vice president of Automotive Products Group at semiconductor supplier Microchip Technology Inc., believes there needs to be consolidation in the networking standards used in vehicles to reduce the burden on gateways to translate communications between various protocols and to create more efficient networks. These break down into three fundamental categories, as shown in Figure 2, Ethernet to support scalable and secure digital communications, PCI Express (PCIe) for short-distance, very high speed SoC interconnections and serializer/deserializer (SerDes) for cost and power-efficient asymmetrical communications, such as transmission of video from a camera or for infotainment. Kaestner explains that to enable the automotive industry to move forward with software-defined vehicles, higher levels of autonomous driving and new technologies such as NTN, the existing distributed network architecture is too bulky and inefficient, necessitating the adoption of zonal-oriented architecture, primarily using Ethernet.
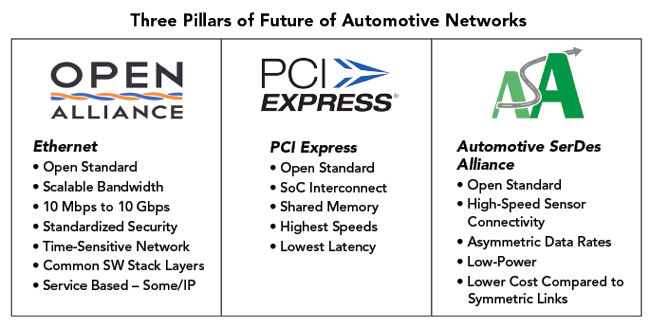
Figure 2 The three pillars of automotive networks. Credit: Microchip Technology, Inc.
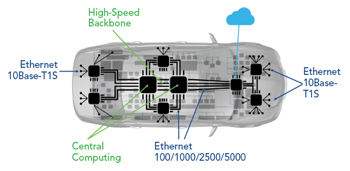
Figure 3 Illustration of evolving in-vehicle networks.
As bus speeds increase, already at 5 GHz for standards such as MultiGigBASE-T1 Ethernet and 64 Gbps for PCIe Gen 6, frequencies are in the microwave domain with all the associated transients, coupling and isolation issues familiar to analog RF designers. As this boundary becomes blurred, the linearity and signal integrity of high speed communications become more prominent, and this also applies to the testing of ICs. Figure 3 shows an illustration of evolving in-vehicle networks as a data center on wheels, showing the shift to centralized computing, zonal architecture and a high speed Ethernet backbone, as bus speeds push into the microwave domain.