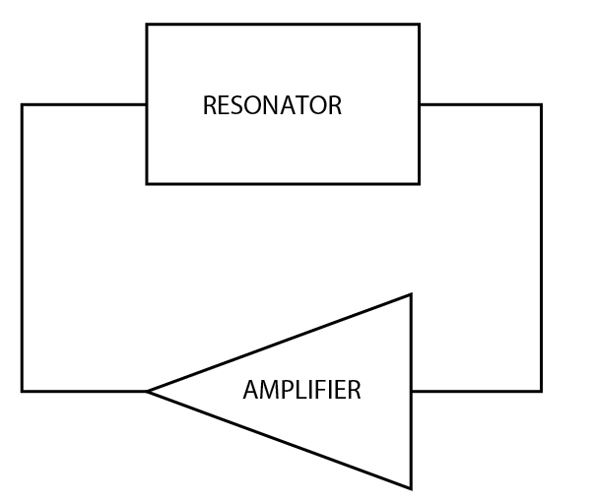
Generally, an oscillator can be seen as a positive feedback system.
It usually consists of an amplifier followed by a resonator, which is fed back to the amplifier input, as shown in Figure 1 .
The amplifier task is to compensate for the losses in the resonator, and the resonator does the frequency selection.
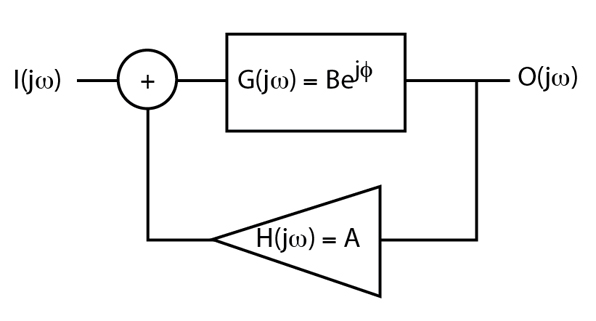
It is of interest how these components should behave to generate the proper oscillation. Figure 2 shows a simplified mathematical representation of a feedback system. The amplifier is assumed to have no phase shift, a gain of A, and infinite input and zero output impedance.
The resonator is a simple phase shifter with an attenuation B. The input signal I(j ) is summed with the amplifier output signal and fed into the phase shifter. The output signal O(j ) is the output of the phase shifter and the input of the amplifier.
) is summed with the amplifier output signal and fed into the phase shifter. The output signal O(j ) is the output of the phase shifter and the input of the amplifier.
The transfer function of the circuit can then be stated as
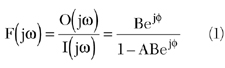
where
 = ( ) = f( )
= ( ) = f( )
and otherwise the oscillator's frequency is not defined. The formula stated in Equation 1 describes the behavior of a feedback loop by injecting a signal I(j ) into the circuit while observing the output O(j ). Therefore, to obtain a real oscillator condition without injection of an input signal, I(j ) must fade to zero, while maintaining an output signal O(j ). This is mathematically stated as
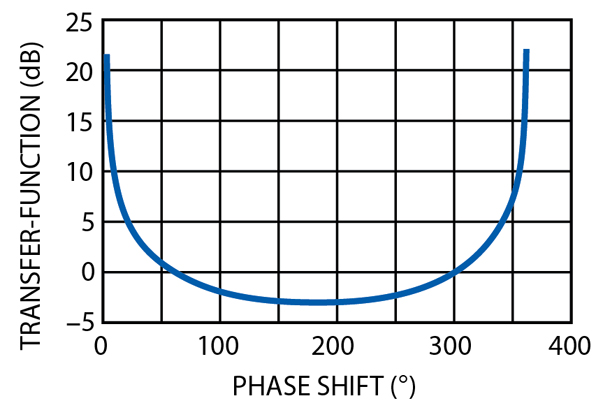
It can be seen in Equation 2 that if I(j ) goes to zero, the other multiplication term must raise to infinity to get an output different from zero. So A·B must be equal to 1. Figure 3 shows the transfer-function stated in Equation 1 with A = 1 and B = 1, as a function of the phase shift . It is easy to see that a phase shift of n x 360° raises the transfer-function to infinity. For B = A = 1, Equation 2 can be simplified to
Using the rule of L'Hospital, and with the phase going to zero for the oscillating condition, the output can be calculated as
This relation is commonly known as the Barkhausen criterion, which states that the loop gain must be 1 and the loop phase shift multiples of 360° to obtain oscillation.
Transformation
The next question is how the numerous existing oscillator circuits can be converted to a feedback loop system. Stan Alechno showed1 that nearly every oscillator can be converted to a common-emitter circuit, by first connecting all ground and power supply nodes, then letting them float and grounding the emitter. However, if feedback is performed inside the transistor, the circuit cannot be transformed.
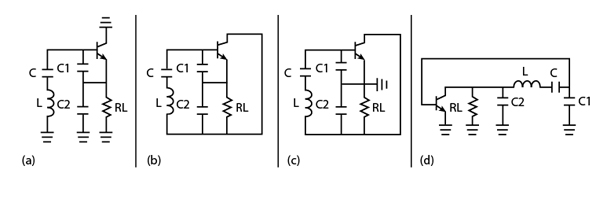
Figure 4 shows an example of how a common-collector negative resistance oscillator can be transformed to a common-emitter circuit with the basic oscillator topology. As can be seen, the first conversion in (a) is to connect all the ground and power supply terminals together. This is possible, as power supply nodes represent a AC ground node, because the AC voltage is grounded by the large blocking capacitors between supply voltage and the common ground. The next step is to remove the ground from the circuit by letting all nets float. Now the ground can be placed on every node in the circuit, where it is advantageous for further analysis. In this case, the emitter of the bipolar transistor is grounded in (c). If the circuit in (c) is rearranged, the circuit in (d) appears, which shows a common-emitter circuit and a back fed resonator consisting of C1, C2, L and C.
This transformation becomes clearer if the ground node is seen as an ordinary circuit node, which is, in this case for example, the ground plane. The power supply, as previously stated, is also an AC ground node. Thus, it is possible to think of any node in the circuit to be the ground node, and to re-sketch the circuit. However, this transformation has an impact on components that are part of the bias-supply of the active device. Since they have a DC function, their behavior changes, as the ground is connected to another node. In the original circuit, the load resistor RL is connected between emitter and ground. A DC current through this resistor will result in a voltage drop across it, resulting in a voltage increase at the emitter and base as well. The base bias resistor must take this voltage drop into account. In the rearranged circuit, the load resistor is connected to the transistor collector and the emitter is grounded. The base bias resistor now has a much larger voltage drop from power supply to the base as compared to the original circuit where the supply voltage to base voltage is lowered through the voltage drop across the load resistor RL. Consequently, the bias network must be recalculated for equal operation of the circuits. An example later in this article will show the difference between the two biasing cases. For further analysis, the oscillator loop must be broken up, and a transfer-function can be recorded. An oscillator theory treating this problem is presented by Rhea2.
Calculations
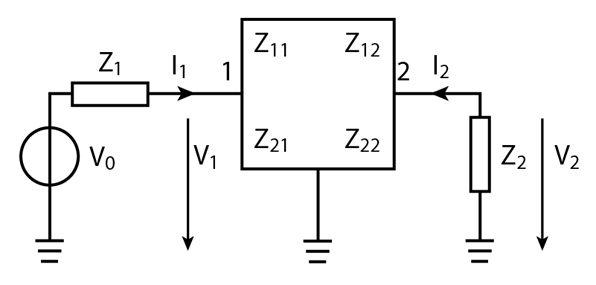
The circuit in Figure 5 can be described by S-parameters, but then the ports P1 and P2 would be terminated in 50  . This would not give the correct result for the transfer-function, since in the closed loop condition the output of the oscillator is terminated with its input's impedance and vice-versa.
. This would not give the correct result for the transfer-function, since in the closed loop condition the output of the oscillator is terminated with its input's impedance and vice-versa.
It is not easy to convert these parameters to more generality since S-parameters are defined for one characteristic impedance. For the sake of understanding, Z-parameters will now be used for defining the problem.
The function
which converts S-parameters to Z-parameters with the identity
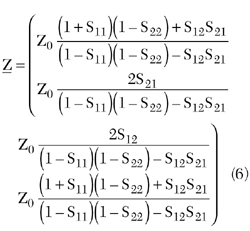
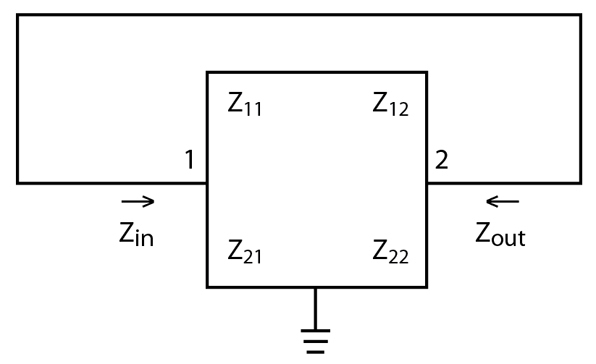
will be used to convert the open loop oscillator circuit to the circuit in Figure 6 , where Z2 indicates the correct oscillator input impedance. More about two-port transformations and oscillators is given by Vendelin, et al.3
The following equations can be derived:
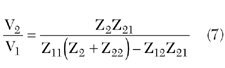
The forward voltage transfer function
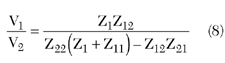
The backward voltage transfer function
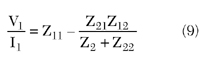
The input impedance
The output impedance
From Equations 7 to 10, it seems clear that all four parameters depend on the termination impedances Z1 and Z2. For correct oscillator function, V2/V1 must be equal to 1. But since this transfer function depends on Z2 and its value is unknown, the transfer function cannot be plotted correctly. If it is assumed for a while that there is no reverse influence from the output to the input (Z12 = 0), the parameters are simplified to
The forward voltage transfer function
The backward voltage transfer function
The input impedance
The output impedance
while Equation 11 still depends on Z2, Equations 13 and 14 are independent. Now, a second view on the oscillator circuit in Figure 7 brings more light to oscillator behavior. As the output of the oscillator is connected with its input, the impedance Z2 will result in V1/I1 = Z11. This means that the oscillator looks back to its own input impedance. With this simplification and the feedback, Equation 11 reduces to
By introducing the oscillation condition into Equation 15, the result is
where it is noted that the Z-parameters are a function of frequency and oscillator power Ps.
In the more general case, if Z12  0, Equation 16 does not hold anymore, and a new way of determining the impedances Z1 and Z2 must be accomplished formally. Oscillation can also be seen in the time domain as a wave traveling in a loop through the oscillator. This means that the wave is traveling through the circuit and is fed back to its input. Since the oscillator has a group delay, the Barkhausen criterion changes to
0, Equation 16 does not hold anymore, and a new way of determining the impedances Z1 and Z2 must be accomplished formally. Oscillation can also be seen in the time domain as a wave traveling in a loop through the oscillator. This means that the wave is traveling through the circuit and is fed back to its input. Since the oscillator has a group delay, the Barkhausen criterion changes to
where
tgrf = the forward group delay
0 = frequency of oscillation
Equation 17 states that the group delay induces a phase shift. The oscillator can be seen as a non-reciprocal transmission line. As continuous reflection occurs in the oscillator from incorrectly terminated impedances, a wave traveling back is induced. However, since the transistor has low backward amplification, this reverse wave is heavily damped. In the case of S12 = 0 in the transistor, the reverse wave is totally blocked by the transistor and the impedances can be calculated as in Equations 13 and 14. This case is very similar to an ideal distributed isolator.
If a certain voltage zero transition in the traveling wave at the input could be marked, and if it were possible to follow it, the zero transition coming out of the oscillator circuit could be seen with a delay of tgrf, as shown in Figure 8 . If it is assumed that the correct termination impedance is already known, the oscillator circuit, terminated with the correct impedance Z2, has the same input impedance Zin=V1/I1 as the closed loop oscillator. Thus, the traveling wave out of the oscillator will have the same conditions of input impedances if it were fed back to the oscillator input or another oscillator circuit input, which is terminated with the correct impedance Z2.
Figure 9 shows the equal input conditions. The impedance Zi1 stands for the closed loop impedance and Zi2 for the input impedance of another oscillator circuit with the same S-parameters, terminated with the correct impedance Z2. As previously stated, Zi1 must be equal to Zi2. Since the second oscillator circuit is of the same type as the first one, the Barkhausen criterion is also fulfilled for the two oscillator circuits in series, as the second oscillator is terminated with the correct impedance Z2. Since the impedance Z2 is assumed to be a replacement of the input impedance of the closed loop oscillator, the loop can be closed, as shown in Figure 10 .
Because the oscillators are from the same type and the Barkhausen criterion is still fulfilled, V1 must be equal to V2 and I1 must be equal to I3. Now it can be easily seen that an infinite number of oscillator blocks can be inserted in the circuit by keeping the input currents and the node voltages equal. In this case, the wave would travel through an infinite number of circuits, which is essentially the same as traveling through one closed loop oscillator circuit. The infinite oscillator block chain circuit can now be analyzed to get the correct termination impedance. For this analysis it is very advantageous to use ABCD parameters, since chaining two-ports can be accomplished by matrix multiplication. A new transform function will be introduced to convert the oscillator's open loop S-parameters to ABCD parameters
So the two two-ports transform to their ABCD equivalents A1 and A2. Now the combined matrix is just

To get some insight into the infinite circuit of Figure 11 , the Z-matrix of the infinite chained oscillator A-matrices will be calculated as
This means that an infinite of  matrices can be chained mathematically as an infinite matrix-multiplication with itself stated as n, which stands for 1 x 1 ... x n. It is very interesting that the coefficients Zo11 and Zo22 converge to a fixed value which will be analytically derived later. Since an amplifier usually has a backward transfer function lower than 1, which means forward gain and backward isolation, the parameter Zo12 goes to zero, so with the Equations 11 to 14, Equation 20 reduces to
matrices can be chained mathematically as an infinite matrix-multiplication with itself stated as n, which stands for 1 x 1 ... x n. It is very interesting that the coefficients Zo11 and Zo22 converge to a fixed value which will be analytically derived later. Since an amplifier usually has a backward transfer function lower than 1, which means forward gain and backward isolation, the parameter Zo12 goes to zero, so with the Equations 11 to 14, Equation 20 reduces to
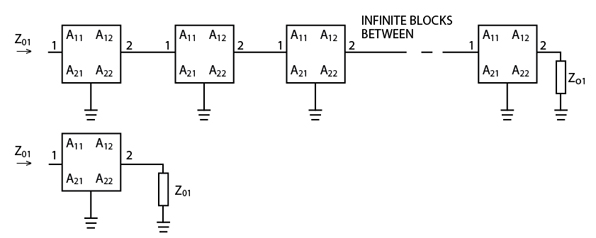
That means that Zo1 is the input impedance and Zo2 is the output impedance of the network. With the determination of the impedances Zo1 and Zo2 the voltage transfer-function can be defined and set to 1. For the conventional oscillator analysis, Z1 will be equal to Zo2, which actually would not be used in oscillator forward analysis, and Z2 will be equal to Zo1, which is the interesting part for the transfer-function. If the loop is closed and broken up anywhere again, the calculated  matrix will have the same coefficients. If the input impedance of an infinite chain of oscillator two-ports is Zo1, it will still be Zo1 if only one two-port is removed since there will still remain an infinite chain of oscillators. This shows that the input impedance of one single oscillator two-port must be Zo1 if its output is terminated with Zo1, as shown in Figure 12 .
matrix will have the same coefficients. If the input impedance of an infinite chain of oscillator two-ports is Zo1, it will still be Zo1 if only one two-port is removed since there will still remain an infinite chain of oscillators. This shows that the input impedance of one single oscillator two-port must be Zo1 if its output is terminated with Zo1, as shown in Figure 12 .
From this approach it seems clear that the oscillator closed loop impedances are Zo1 and Zo2. To calculate the impedances Zo1 and Zo2 directly, the diagram for a two-port can be used with Equations 9 and 10 to obtain a solution. The definition out of (9) and (10) will then be
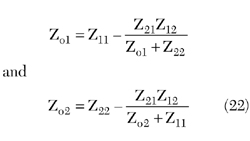
If these relations are transformed with respect to Zo1 and Zo2, two quadratic equations result. The solution for these equations are:
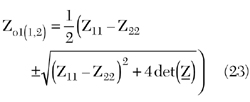
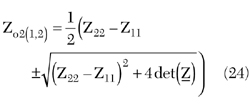
As it can be seen from Equations 23 and 24, four solutions are possible, but only two of them are meaningful. The one with the positive real part is the preferred one, as the impedances should be passive in feedback designs.
The main difference between an oscillator and a transmission line is that the oscillator contains an active device, in which the input power is amplified with some gain. Thus, it is possible to get reflections and |S21| = 1 at the same time.
This is not possible in ideal transmission lines since there S11 must be zero for lossless operation. The reflections in the oscillator travel backwards and have their own propagation properties. Through the reverse isolation of the oscillator, this reverse wave is damped, but not extinguished. Since this wave is generated in every two-port in a chain, it influences the input impedance of the oscillator, which has been taken into account in Equations 23 and 24. The impedances Zo1 and Zo2 from Equation 21 can be seen as the characteristic impedances of the traveling waves (forward and reverse), as the node voltages and input currents are equal over the whole infinite two-port chain.
Simulation
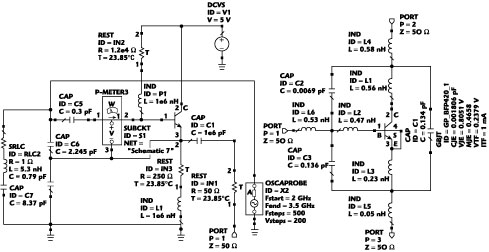
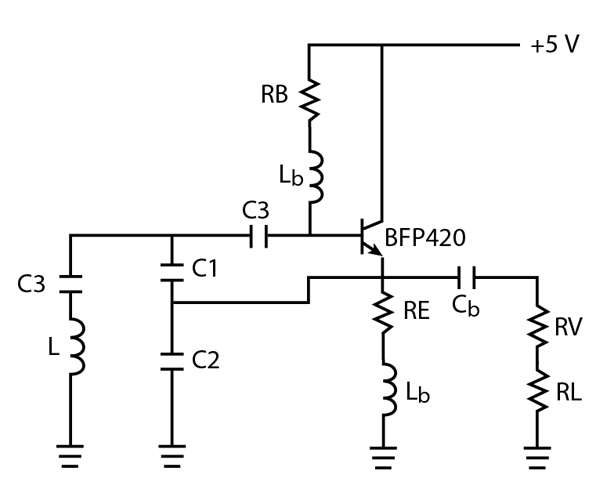
A simplified common-collector oscillator is designed for an oscillation frequency of 2.9 GHz and a loop power of 0 dBm. Its schematic is shown in Figure 13 . The bipolar transistor is a BFP-420 from Infineon.
The resistors RB and RE are for biasing, while Lb and Cb are AC- and DC-blocking components, respectively. RV is a coupling resistor to prevent oscillation from quenching, because of too low output load. The capacitor C3 has been introduced to get more flexibility in frequency adjustment. After the transformation to a common-emitter configuration, the circuit can be drawn, as illustrated in Figure 14 .
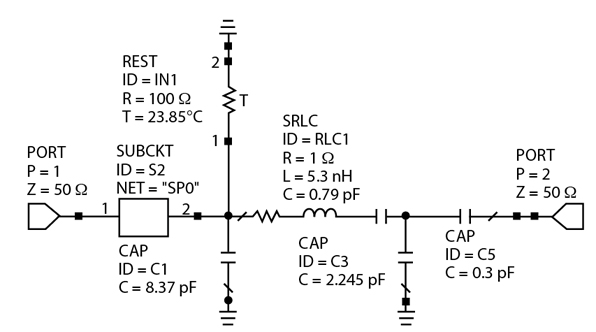
The subcircuit-block "SUBCKT" is a replacement of the BFP-420 transistor common-emitter, large-signal S-parameters for an input power of 0 dBm. Some harmonic balance simulations have been done with the pure transistor amplifier to get the different large-signal parameters at certain power levels. These large-signal parameters are only a modeling help, but they do not really exist by definition of scattering parameters, since, through the strong nonlinearities of the active device, many harmonics will be generated. The parameters are also dependent on the used power, so this part of the modeling will produce the largest error in the transfer-function behavior. The 100 resistor replaces the sum of Rv + RL. Blocking components such as Lb and Cb have been removed, as they have no influence on the oscillator analysis. Next the transfer-function is calculated with the Microwave Office Program4 and the formulas of Table 1 , using Z-parameters with the result of Equation 21 introduced into Equation 7 and plotted over frequency, as shown in Figure 15 .
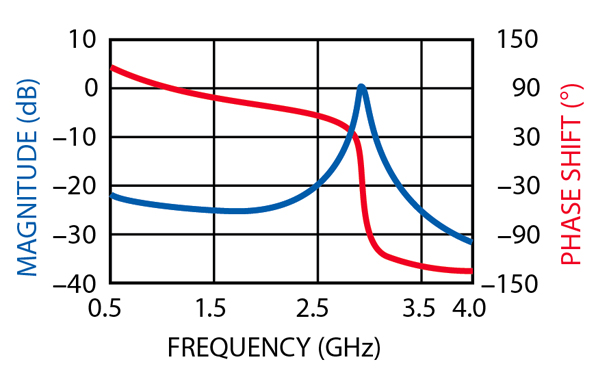
Good proof that the plotted transfer-function is correct is to move the components from the output to the input. Since the oscillator analysis should be independent of the resonator location, the position of amplifier and resonator can be changed without altering the transfer-function. Even partial resonator components can be transferred from input to output and vice-versa without effect. With the component values chosen, the transfer-function is evaluated. It can be extracted that the phase shift crosses zero at 2.901 GHz, while the magnitude is -0.358 dB at the same frequency. To verify these results, an harmonic balance analysis has been set up and simulated.
One thing for which care must be taken is the different transistor biasing in Appendix A compared to a common-emitter circuit. It is very important that the collector-current and collector-emitter voltage stay equal to the common-emitter large-signal equivalent circuit. The basic SPICE-model of the bipolar transistor is presented in the figure, with its package parasitic components. The harmonic balance simulation results are compared to the transfer-function approach in Table 2 .
|
Table 1 |
|
NZ11 = Schematic 1:Z[1,1] |
|
NZ12 = Schematic 1:Z[1,2] |
|
NZ21 = Schematic 1:Z[2,1] |
|
NZ22 = Schematic 1:Z[2,2] |
|
ZK = 0.5*(NZ11-NZ22+sqrt((NZ11-NZ22)* |
|
VK = (ZK*NZ21)/ |
|
Table 2 | |||
|
|
Transfer- |
Harmonic |
Error |
|
Frequency |
2.9 |
2.9078 |
0.3% |
|
Power |
0 |
-0.2 |
0.2 dB |
Conclusion
It has been shown that for many types of oscillators which can be converted to a feedback system, an accurate estimate of the oscillator frequency and output power is possible. Through linking an infinite number of oscillator open loop circuits, the true input and output termination impedances are defined. With Equations 23 and 24, these impedances can be calculated and inserted in an open loop analysis with a single oscillator circuit, from which a transfer-function can be plotted. The oscillation point can be determined by the general oscillator conditions (gain = 1 and phase shift = n x 360°). Using small-signal parameters, the start-up condition can be checked, and with the transistor's large-signal S-parameters at a certain input or output power, the oscillator can be designed the way that the true loop power will meet the large-signal estimate. Since the large-signal S-parameters of the transistor are measured without the resonator circuit, the different terminations of harmonics as well as unknown reflections of the different harmonics and the fundamental frequency will influence the termination impedances. Further, the model which describes the active device must be accurate enough, as otherwise the results of the transfer-function approach will agree with the harmonic balance simulation results, but probably not the physical implementation. Good parasitic- and nonlinear-modeling are obligatory. The comparison shows that the estimation error will be less than one percent for the frequency and less than 0.5 dB for power, which will be satisfying for most applications.
References
1. S. Alechno, "The Virtual Ground in Oscillator Design - A Practical Example," Applied Microwave & Wireless , Vol. 11, No. 7, July 1999.
2. R.W. Rhea, Oscillator Design and Computer Simulation , Noble Publishing, Atlanta, GA, 1995, pp. 11-15.
3. G.D. Vendelin, et al., Microwave Circuit Design Using Linear and Nonlinear Techniques , Wiley-Interscience, 1990.
4. AWR Research, Microwave Office 2002, educational version.
Gerhard A. Hofbauer received his diploma degree from Graz University of Technology in May 2002, and is currently working toward his PhD degree in the department of communication and wave propagation at the same university. He is currently designing microwave, RF, IF, low frequency and digital circuits for a pulsed Doppler radar in C-band for civil applications, as well as precision wideband microwave measurement equipment. He can be reached via e-mail at hofbauer@ieee.org.
|
Appendix A
|