
This article covers the basic concepts of antenna measurements, including definitions of the reactive near-field, radiating near-field and radiating far-field; primary antenna measurement parameters; and the various types of antenna measurements, including pattern, gain and polarization measurements. The most common types of measurement range configurations are detailed, including far-field range configurations such as the elevated range, slant range, ground-reflection range and compact range; and near-field ranges such as planar, cylindrical and spherical. A future article will focus on the applicability of different types of antenna measurement ranges to specific antenna measurement requirements.
Basic Antenna Concepts
Electromagnetic Waves
The radiation field from a transmitting antenna is characterized by the complex Poynting vector E × H* in which E is the electric field and H is the magnetic field. Close to the antenna, at a distance r from the antenna, the Poynting vector is imaginary (reactive) and the fields decay more rapidly than 1/r, while farther away from the antenna, the Poynting vector is real (radiating) and the fields decay as 1/r. These two types of fields dominate in different regions of the space surrounding the antenna. Based on this characterization of the Poynting vector, three major regions can be identified (see Figure 1).
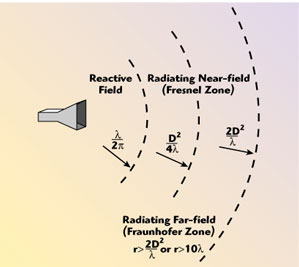
Fig. 1 Radiating regions.
Reactive Region
This region is the space immediately surrounding the antenna. The extent of this region is given approximately as 0 < r < ?/2?, where l is the wavelength. In this region, all three spatial components (r ,?, ?) decay more rapidly than 1/r.
Radiating Near-field
Beyond the reactive region, the radiating fields begin to dominate. The extent of the radiating near-field region is ?/2? < r < 2D2/?, where D is the largest dimension of the antenna. This region can be divided into two sub-regions. For ?/2? < r < D2/4?, the fields decay more rapidly than 1/r and the radiation pattern (relative angular distribution of the field) is dependent on r. For D2/4?< r < 2D2/?, the fields decay as 1/r and the radiation pattern is still dependent on r. The radiation pattern is given as the Fourier transform of the aperture distribution (with a phase error in excess of ?/16). The phase error is dependent on r (as r ->?, the phase error approaches zero). This region is often referred to as the Fresnel region.
Radiating Far-field
Beyond the radiating near-field region, for r > 2D2/?, the Poynting vector is real (only radiating fields are present) and has only two spherical coordinate components (?, ?). The fields decay as 1/r and the radiation pattern is independent of r. The radiation pattern in this region is approximated by the Fourier transform of the aperture distribution (with a phase error of less than ?/16). This region is referred to as the Fraunhofer region.
Antenna Parameters Polarization
Polarization is the property of the electric field vector that defines the variation in direction and magnitude with time. If the field is observed in a plane perpendicular to the direction of propagation at a fixed location in space, the end point of the vector representing the instantaneous electric field magnitude traces a curve. In the general case, this curve is an ellipse, as shown in Figure 2. The ellipse is characterized by the axial ratio (AR), the ratio of the major and minor axes, and the ellipse major axis tilt angle ?. The polarization may be classified as linear, circular or elliptical according to the shape of the curve. Linear and circular polarizations are special cases of elliptical polarization, when the ellipse becomes a straight line or a circle, respectively. Clockwise rotation of the electric field vector is designated as right-hand polarization (RH) and counterclockwise rotation is left-hand polarization (LH), for an observer looking in the direction of propagation.
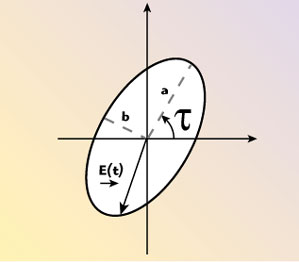
Fig. 2 Elliptical polarization.
Input Impedance and VSWR
The input impedance is defined as the impedance presented by the antenna at its terminals. If the antenna is not matched to the interconnecting transmission line, a standing wave is induced along the transmission line. The ratio of the maximum voltage to the minimum voltage along the line is defined as the voltage standing wave ratio (VSWR). The effect of an impedance mismatch is to reduce the overall antenna efficiency and thus gain.
Directivity
The directivity is a parameter that quantifies the directional characteristics of the antenna pattern. It is defined as the ratio of the antenna radiation intensity in a specific direction in space to the radiation intensity of an isotropic source, assuming equal radiated power. Peak directivity is defined as the directivity at the angle of peak radiation of the antenna.
Efficiency
The antenna efficiency accounts for all the losses in the antenna, prior to radiation. The losses may be due to mismatch at the input terminals, conduction losses, dielectric losses and aperture illumination losses.
Gain
The gain of the antenna is defined as the product of the directivity and the efficiency. It thus takes into account the directional and loss characteristics of the antenna. The gain in a given direction is key in determining the ability of the antenna to provide an adequate link margin or to provide adequate sensitivity for the system under consideration.
Effective Isotropic Radiated Power
The effective isotropic radiated power (EIRP) is a figure of merit for the net radiated power in a given direction. It is equal to the product of the net power accepted by the antenna and the antenna gain.
Radiation Pattern
The antenna radiation pattern is the mapping of the radiation levels of the antenna as a function of the spherical coordinates (?, ?). In most cases, the radiation pattern is determined in the far-field region for constant radial distance and frequency. A typical radiation pattern is characterized by a main beam and a series of side lobes at different levels (see Figure 3). The antenna performance is often described in terms of its principal E- and H-plane patterns. For a linearly polarized antenna, the E- and H-planes are defined as the planes containing the direction of maximum radiation and the electric and magnetic field vectors, respectively.

Fig. 3 Radiation patterns (a) rectangular form and (b) polar form.
Antenna Noise Temperature
The antenna noise temperature is a parameter that describes the noise power received by the antenna. It can be obtained by integrating the product of the antenna directivity and the brightness temperature distribution of the environment over the entire space surrounding the antenna. The brightness temperature of the environment is dependent on many noise sources: cosmic, atmospheric, man-made and ground. The noise power received at the antenna terminals is equal to KTaB, where K is the Boltzman constant, Ta is the antenna noise temperature and B is the bandwidth of the system receiver. A convenient figure of merit, proportional to the signal-to-noise ratio received by the antenna, is G/T, where G is the antenna gain and T is the receiving system noise temperature in degrees Kelvin, and is given as the summation of the antenna noise temperature and the RF chain noise temperature from the antenna terminals to the receiver output.
Antenna Measurements
Testing is performed on both indoor and outdoor ranges, with associated limitations for both. Outdoor ranges are not protected from environmental conditions, while indoor ranges are limited by space restrictions. Indoor ranges utilize anechoic chambers to provide a non-reflective environment in which to conduct the measurements. There are two basic forms of anechoic chambers: rectangular and tapered. Tapered chambers are generally used where low frequency performance is of high importance (typically for frequencies below 1 GHz).
Radiation Pattern Measurements
The radiation pattern of an antenna is three-dimensional over a sphere surrounding the antenna (see Figure 4). Because it is not always practical to measure a three-dimensional pattern, a number of two-dimensional patterns (referred to as pattern cuts) are often measured. This can be accomplished by using different types of positioners, such as elevation-over-azimuth (EL/AZ), azimuth-over-elevation (AZ/EL), or roll-over-azimuth (Roll/AZ) mounts.
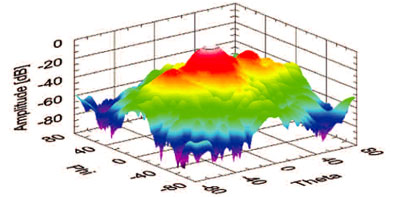
Fig. 4 Three-dimensional radiation pattern.
Directivity Measurement
The antenna directivity may be computed using measurements of the radiation pattern. This is often accomplished numerically by integrating the radiation intensity over the entire space of the surrounding sphere.
Gain Measurement
There are two basic methods that can be used to measure the gain of an antenna: absolute gain and gain comparison techniques. The absolute gain method requires no a priori knowledge of the transmitting or receiving antenna gain. If the receiving and transmitting antennas are identical, one measurement and the use of the transmission formula are sufficient to determine the gain. If the antennas are different, three antennas and three measurements are required to formulate a set of three equations with three unknowns to determine the gain of the antenna under-test (AUT). In the gain comparison method, standard gain antennas, whose gain is known, are used to determine the absolute gain of the AUT.
Polarization Measurement
Two methods are commonly used for polarization measurement. One is called the “spinning linear” method, where a linear source is rotated through all linear polarization states, thus yielding a direct measurement of the antenna under test axial ratio. The second common method is the dual-polarization method, where the response of the antenna under test is measured for two source illuminations characterized by orthogonal polarizations (typically linear vertical and linear horizontal). In this case, measuring the complex (amplitude and phase) response of the antenna under test yields, with appropriate analysis, the axial ratio, tilt angle and sense of the antenna.
Far-Field Measurements
Far-field Ranges
Far-field measurements can be performed using either outdoor or indoor ranges. In general, there are two basic types of far-field antenna ranges: ground reflection ranges and free-space ranges. In the ground reflection range, a constructive interference between the direct ray from the source antenna and the specular reflection from the ground is utilized to illuminate the test zone. In the free-space ranges, the reflections from the ground are minimized. There are several types of free-space ranges, primarily elevated ranges and slant ranges. A related type of range is a free-space class range that utilizes a compact range reflector to achieve a plane wave illumination that is approximated by other far-field measurement ranges.
Ground Reflection Range
In a ground reflection range, the specular reflection from the ground is used to obtain uniform amplitude and phase distribution over the AUT (see Figure 5). This requires a smooth range surface. The range length r is designed to meet the far-field criterion. The interaction of the direct radiation from the source and the specular ground reflection over the test zone produces an interference pattern, with alternating maxima and minima. The heights of the source and AUT are chosen so that the AUT is centered on the first interference lobe. This criterion determines the relation between the source height, ht, and the AUT height, hr, to be ht ~ ?R/4hr. If the amplitude taper over the AUT is required to be no more than 0.25 dB, the height of the AUT should meet the criterion hr > 3.3D.
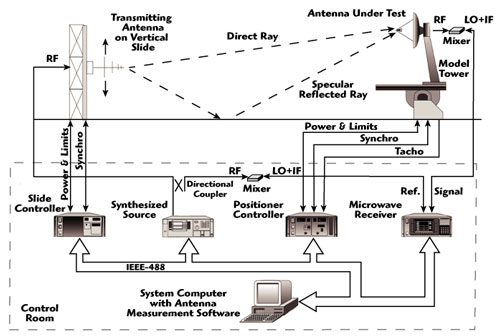
Fig. 5 Ground reflection range configuration.
Elevated Range
Elevated ranges are usually designed to operate mostly over terrain. The antennas are typically mounted on towers or on roofs of adjacent buildings (see Figure 6). The range length r is designed to meet the far-field criterion r > 2D2/?, in which D is the largest dimension of the source or AUT. The height of the AUT, hr, is determined by two criteria related to the source antenna. The source antenna is usually chosen so that the amplitude taper over the AUT is typically no greater than 0.25 dB. In addition, to minimize the range reflections, its first null points toward the base of the test tower. These two criteria determine the height of the AUT to be hr > 4D. Occasionally diffraction fences are required to further suppress ground reflections. In some cases, the elevated range is implemented with the source and AUT site on local terrain peaks, with a valley in-between, which minimizes any contribution from ground reflections.
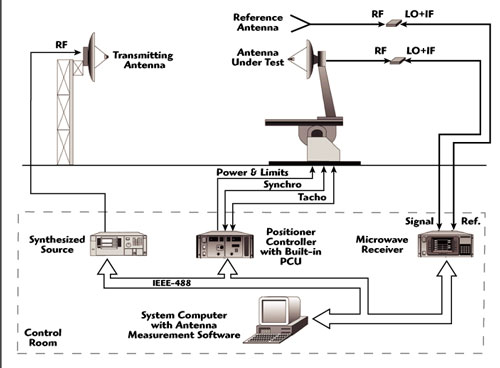
Fig. 6 Elevated range configuration.
Slant Range
A slant range is one in which the source antenna is located close to the ground and the AUT is mounted on a tower (see Figure 7). The source antenna points toward the center of the AUT and its first null points toward the tower base. It is desirable that the tower of the AUT be constructed of non-conducting materials to reduce reflections. Slant ranges, in general, require less real estate than elevated ranges.
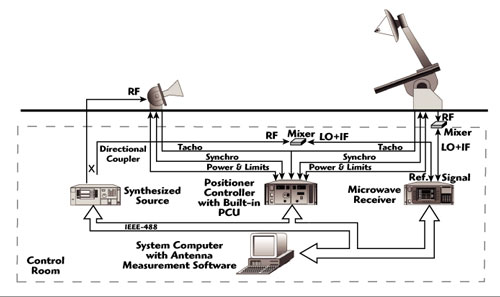
Fig. 7 Slant range configuration.
Compact Range
Antenna measurements require that the AUT be illuminated by a uniform plane wave. This requirement is approximately achieved in the far-field for a range length r > 2D2/?, which, in many cases, dictates large distances. A compact range creates a plane wave field at distances considerably shorter than those required using the conventional far-field criteria. The plane wave produced by a compact range is generated by a large parabolic reflector (see Figure 8). The parabolic reflector converts a spherical phase front from the illuminating feed into a planar phase front close to its aperture. There are several major factors that affect the compact range performance: aperture blockage and edge diffraction. The aperture blockage is reduced by utilizing an offset reflector system. The edge diffraction is reduced by using serrated or rolled edges.
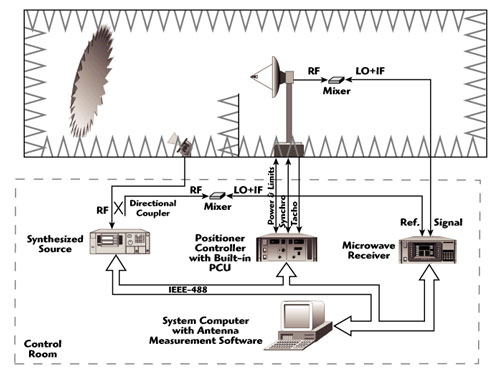
Fig. 8 Compact range configuration.
Near-field Measurements
The required volume of an antenna test range may be reduced by making measurements in the near-field of the AUT, and then using analytical methods to transform the measured near-field data to the far-field radiation pattern.
Types of Near-field Set-ups
The measured near-field data (amplitude and phase) is acquired by using a probe to scan the field over a geometrical surface, which is typically a plane, a cylinder, or a sphere. The measured data is then transformed to the far-field pattern, using post processing.
Planar
In the planar scanning technique, a probe antenna is moved over a plane situated in front of the AUT. The position of the probe is characterized by the coordinates (x, y, z0) in the coordinate system of the AUT. During the scanning process, z0 is kept constant while x and y are varied. The distance z0 is usually set within the range of 3? to 10? to avoid sampling of the reactive energy of the AUT. The dimensions of the near-field scanning aperture must be large enough to capture all significant energy from the AUT. The scan dimensions, Ds, also have to meet the criterion Ds > D + 2z0 tan ?, where D is the largest AUT dimension and ? is the maximum processed radiation pattern angle (see Figure 9). Three basic types of scans exist in planar near-field measurements: rectangular, plane-polar and bi-polar. In the plane-rectangular scan, the data is collected on a rectangular grid and processed by the conventional fast Fourier transform (FFT) algorithm. Sampling theory dictates a sample spacing of ?x = ?y = ?/2.
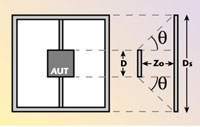
Fig. 9 Maximum scan size.
In the plane-polar technique, the AUT is rotated about its axis and the probe is attached to a linear positioner placed above the AUT (see Figure 10). The combination of the antenna rotation and linear probe motion yields planar near-field data collected on concentric rings, with data points lying on radial lines. The polar near-field data is processed to the far-field by a Jacobi-Bessel transform or by interpolation to obtain a rectangular grid for an FFT algorithm.
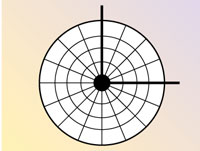
Fig. 10 MPlane-polar scanning geometry.
The bi-polar technique is similar to the plane-polar configuration in the sense that the AUT is rotated, but differs in the probe motion. The probe is rotated about a second axis and describes an arc that passes through the AUT axis (see Figure 11). The combination of antenna rotation and probe arm rotation yields planar near-field data collected on concentric rings with data points laying on radial arcs. The near-field data is interpolated into a plane-rectangular grid. The rectangular data is then processed using the FFT to obtain the radiation pattern.
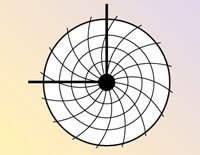
Fig. 11 Bi-polar scanning geometry.
Cylindrical
In the cylindrical scanning technique, the AUT is rotated around the z-axis of a xyz-coordinate system, while the probe is moved along a linear axis parallel to the z-axis (see Figure 12). The probe is located at a distance a, typically chosen to be the smallest cylinder radius enclosing the AUT. The cylindrical scanning enables obtaining the exact azimuth pattern but only a limited elevation pattern due to the truncation of the scanning aperture in the z direction. In accordance with the sampling theory, the sampling spacing is given as ?? = ?/ 2a and ?z =?/2.
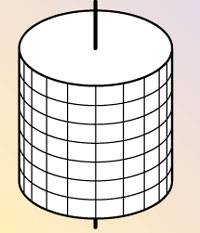
Fig. 12 Cylindrical scanning geometry.
Spherical
In the spherical scanning technique, the AUT is rotated around the z-axis, and the probe is moved on a circular track in the q direction (see Figure 13). The radius of the rotation is “a” and is typically chosen as the smallest radius enclosing the AUT. An alternative is to keep the probe stationary and move the AUT in two axes, often chosen as a “roll-over-azimuth” positioner configuration. The advantage of spherical scanning is that it delivers the full extent of the AUT three-dimensional pattern. The sampling spacing is determined by the sampling theory to be ?? = ?? = ?/2a.
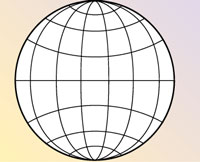
Fig. 13 Spherical scanning geometry.
Conclusion
A summary of basic antenna properties and terms has been presented, along with a description of the most often measured antenna parameters. A review of the basic methods for measuring antennas has been outlined, with the highlights of each method noted. A wide variety of measurement range types and geometries are available. The fundamental differences between the far-field and near-field measurement methodologies were detailed. A future article will focus on the trade-offs of using each type of range and the types of ranges that are best suited to specific antenna types and measurement requirements.
John Aubin received his BSEE degree from Virginia Tech in 1977, his MBA degree from Temple University in 1983 and his MSEE degree from Drexel University in 1988. He currently serves as vice president for business development and chief technology officer at ORBIT/FR Inc., Horsham, PA. His interests include antenna measurement technology, wireless systems engineering and antenna design. He has served as principal engineer on a number of automated antenna and radar measurement systems ranging from VHF to millimeter waves and has authored over 25 papers on antenna, radar and measurement technology.