

When traditional optical sensors are limited, such as during cloud cover, smoke, or low-light conditions, and ground-based radar performance is constrained by Earth’s curvature, especially for long-range or low-altitude targets, GNSS signals reflected off surfaces including oceans, land, ice, and man-made structures offer a valuable alternative for Earth observation. This technique, called GNSS Reflectometry (GNSS-R), utilizes both direct and reflected signals from satellite navigation systems such as GPS, Galileo, or BeiDou. This approach enables continuous monitoring and enhances situational awareness, even in challenging environments.
One notable application of GNSS-R is in search-and-rescue operations. For example, imagine a vessel that goes missing off the coast of Massachusetts at night due to a temporary loss of GPS signal caused by adverse weather conditions. A nearby rescue team, equipped with a GPS receiver, can make use of both direct satellite signals and reflections from the vessel’s surface. These reflected signals provide critical information regarding the vessel’s position, orientation, and movement. By analyzing these parameters, the team can estimate the vessel’s location even in limited-visibility conditions, thereby enabling faster response, more effective coordination, and an increased likelihood of a successful rescue operation.
To better understand how GNSS-R provides this critical information, it’s helpful to look at the underlying principle of the technique. Essentially, GNSS-R operates as a form of passive radar, leveraging both the direct signals from satellites and those reflected off surfaces of interest. By analyzing the differences between these signals, precise measurements can be extracted, revealing the location and movement of objects.
How Does It Work?
GPS satellites continuously broadcast signals across the globe. A ground-based GPS receiver normally uses these signals for positioning by measuring their time of arrival (TOA). In passive radar, the concept is extended:
- The direct GPS signal travels from the satellite to the receiver.
- The reflected GPS signal bounces off the ship before reaching the receiver.
By comparing these two signals, the extra travel time caused by the reflection can be calculated. This extra time corresponds to the bistatic range, which is proportional to the time-difference-of-arrival between the two signals.
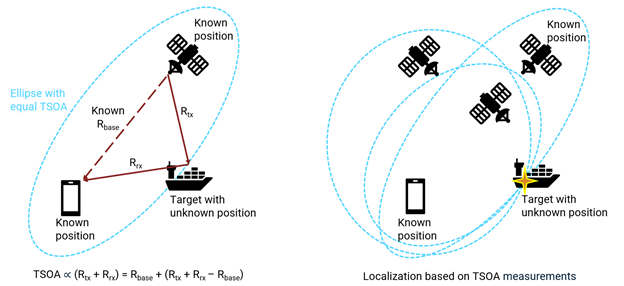
Figure 1: Target localization using Time-Sum-of-Arrival (TSOA) measurements.
In geometry, an ellipse is defined as the set of points where the sum of the distances from two fixed points (called foci) is always the same. In this case:
- The two fixed points (foci) are the satellite and the receiver (e.g., a GPS device on land).
- The unknown point (the ship) lies somewhere on this ellipsoid because:
Distance (Satellite → Ship) + Distance (Ship → Receiver) = Constant
This constant is equal to the total measured signal path length. When only one satellite and one receiver are used, the ship’s possible positions form an ellipsoid. Using multiple satellites creates multiple ellipsoids, which intersect to determine the exact position. The ship is located where all these ellipsoids intersect.
Figure 1 consists of two diagrams illustrating how GNSS-Reflectometry or bistatic radar principles can be used to locate a target (e.g., a ship in our application) using time-sum-of-arrival (TSOA) measurements.
The scenario can be modeled and simulated while implementing the necessary signal processing steps. This requires capabilities for simulating a GPS constellation in orbit, generating waveforms, and performing radar-like signal processing. The workflow can be described as follows:
Simulation and Signal Processing Steps
1. Simulating GPS Satellite Positions and Ship Movement
- A virtual environment is created in MATLAB that models:
- The positions and orbits of GPS satellites at a given time using ephemeris data.
- The receiver location (e.g., a lighthouse or rescue station).
- The ship's possible movement pattern in the ocean, which may include variations in speed and direction.
- This simulation ensures that all geometry-related parameters like distances, angles, and Doppler shifts are accurately represented.
2. Generating GPS Signals and Bistatic Propagation
- GPS satellites transmit signals using C/A (Coarse/Acquisition) codes on the L1 band and P(Y) codes on other bands.
- These signals are modulated using spread-spectrum techniques, making them resilient to interference.
- For simulation:
- Direct signals from satellites to the receiver are generated.
- Reflected signals from the ship (satellite → ship → receiver) are also generated.
- Both direct signals and reflected signals travel along different paths with different delays and Doppler shifts.
3. Estimating TSOA Using Advanced Correlation and Doppler Analysis
- Correlation processing:
- Match the received reflected signal with the known GPS code sequence to identify the delay (which gives the bistatic range).
- TSOA Calculation:
- TSOA is calculated by adding the propagation time on the known reference distance (Distance between GPS Satellites and ground-based receiver) and the time-difference-of-arrival between the target signal and the direct-path signal.
- Doppler analysis:
- Measures frequency shifts in the reflected signal caused by the ship’s motion, improving accuracy in localization.
- Interference cancellation is needed to suppress the dominant direct-path signal; without it, the strong direct-path energy overwhelms the spectrum and masks the weak reflected signal.
4. Position Estimation by Intersecting Multiple Ellipsoids
- For each satellite:
- The constant TSOA forms an ellipsoid with the satellite and receiver as its foci.
- Using multiple satellites:
- Several ellipsoids are generated, and the ship lies at their intersection point.
- The position estimation is solved by the iterative weighted least squares algorithm.
Results
Figure 2 illustrates a satellite-based simulation where a GPS device positioned on the coastline receives signals from multiple GPS satellites (shown as green dashed lines). Using these signals and their reflections from the ship, the system estimates the ship’s position several kilometers offshore. The purple line represents the estimated trajectory of the ship highlighting how GPS reflections and bistatic measurements enable accurate localization.
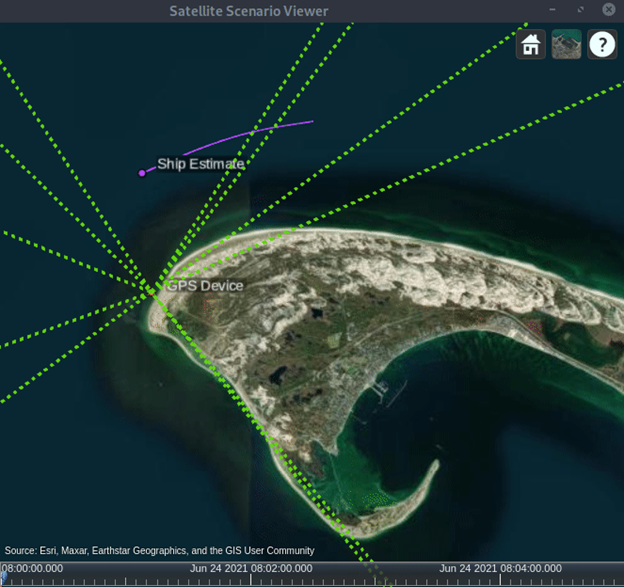
Figure 2: Satellite-based bistatic radar scenario for ship localization using GPS reflections.
Figure 3 shows a comparison between the actual ship position and the estimated position derived from GPS-based bistatic measurements. The actual ship position is marked as “Ship,” while the estimated position is labeled “Ship Estimate.” The two parallel purple lines represent the ship's true trajectory and its estimated trajectory over time, indicating the accuracy of the localization process.
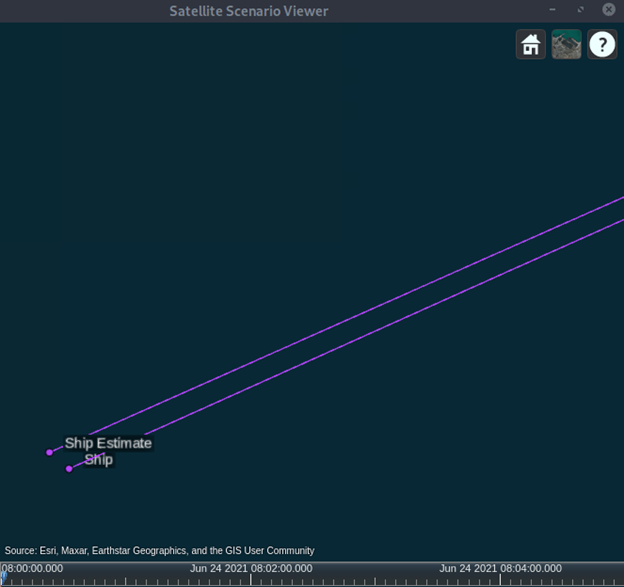
Figure 3: Actual versus estimated ship trajectory using GPS reflections. The estimated trajectory is expressed in latitude (degrees), longitude (degrees), and altitude (meters). (For details on error in the estimate refer to Multistatic Localization of a Ship Using GPS Illuminations)
Global Coverage and Passive Detection Enhance Maritime Safety
Satellite-based localization offers two major benefits: wide coverage, as GPS satellites orbit the Earth to provide near-global visibility, and passive detection, which eliminates the need for the ship to actively transmit signals by instead using reflections of existing GPS signals. This makes GNSS-based multi-static radar an ideal solution for search and rescue operations, delivering a cost-effective, passive, and highly accurate method for locating objects such as ships. By leveraging the GPS constellation, this technology improves maritime safety, strengthens disaster response, and supports various strategic and scientific applications.
To learn more about the topics covered in this Code & Waves blog and explore such designs, see the examples below or email vijayenk@mathworks.com for more information.
- Multistatic Localization of a Ship Using GPS Illuminations (Example code): Learn how to use GNSS-reflectometry for search and rescue applications.
- GPS Waveform Generation (Example code): Learn how to generate Global Positioning System (GPS) legacy navigation (LNAV) data, civil navigation (CNAV) data, and a complex baseband waveform.
- Phased Array System Toolbox (Website page): Design and simulate phased array and beamforming systems.
- Satellite Communications Toolbox (Website page): Simulate, analyze, and test satellite communications systems and links.