
Scenario-1: Transmission of Data Packets from Different Channels in the Presence of Noise
In the first scenario, the dynamic behavior of the system is examined with noise injected in different channels during transmission of the sample message "DATATEST" consisting of eight letters. Each letter of the word "DATATEST" is transmitted at 1-second intervals and there is no noise signal in the environment when the system is energized.
The word "DATA" is sent to the receiver from Channel 1 with a frequency of 300 MHz during a period when there is no noise in the channel. Immediately after, the noise generator is enabled and noise is injected into the 300 to 340 MHz band. The empty channel scanning algorithm starts querying other channels to transmit the remaining part of the data string. Since there is noise in the channels between the frequencies and 300 and 340 MHz, the primary and secondary units on Channel 6 with a frequency of 350 MHz establish a connection and the portion of the data stream "TE" data is sent.
At this time, noise is injected into the 350 to 380 MHz band. Similarly, the channel scanning algorithm establishes a connection on Channel 10 at 390 MHz to send the last two letters of the message, "ST." Thus, the transmission of the data packet, albeit in parts, is accomplished. A screenshot of the spectrum analyzer for Scenario 1 is shown in Figure 7. The channel hopping process successfully transmits the test data in the presence of noise generated in random channels at different times. This is further illustrated in Figure 8.
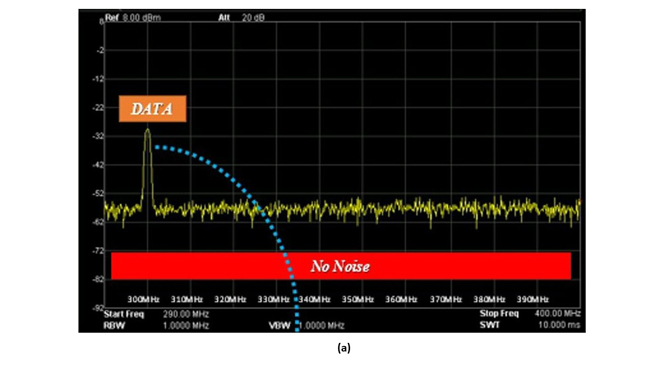
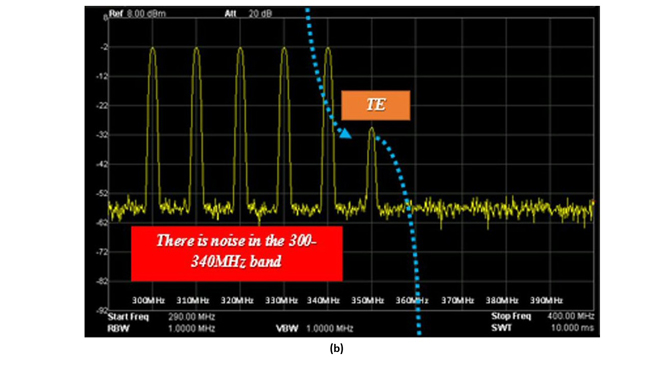
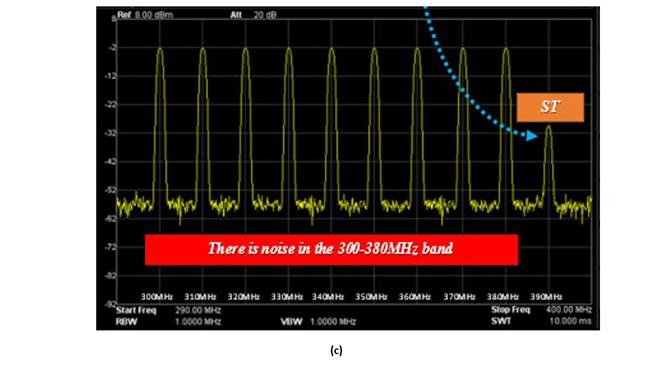
Figure 7 Automatic channel hopping performance in case of random noise injection: "DATA" sent to the receiver from Channel 1 at 300 MHz. with no noise in the channel (a), "TE" sent to the receiver from Channel 6 at 350 MHz with noise in channels 1 through 5 (b), "ST" sent to the receiver from Channel 10 at 390 MHz with noise in Channel 1 through 9 (c).
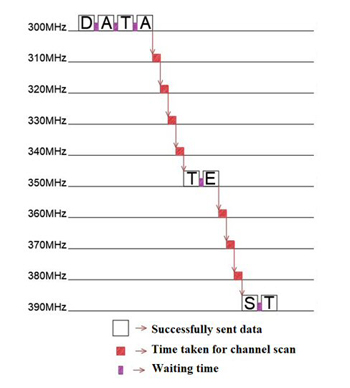
Figure 8 Data packet transmission in the presence of noise.
Scenario-2: Image Transmission with Dynamic Noise Injection
A 5x5 pixel grayscale image of the symbol "1" is transmitted (see Figure 9a). Each pixel has a range of 255 hues between black and white. When there is no noise in the environment, it is expected that all data is transmitted on the same channel. However, in the presence of time-varying noise, the data packet may not be transmitted on the same channel entirely, but in parts from different channels.
This information is transmitted on the first channel with a frequency of 300 MHz. When noise is injected into the 300 MHz channel in the t1 to t3 time interval, the gray tone values (25 and 66) of the second and third pixels are transmitted from the second channel at 310 MHz. Due to the randomly varying noise in the t3 to t25 time interval, data is partially transmitted in the most suitable empty channels (see Figure 9b).
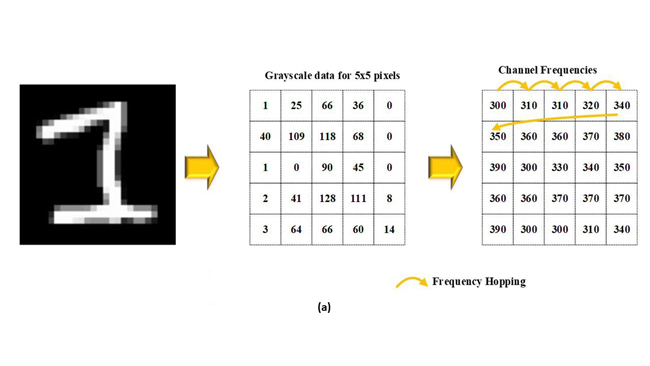

Figure 9 Time-dependent transmission of image data with dynamic noise injection: image mapping (a) and transmission frequency versus time interval (b).
CONCLUSIONS
A new communication system incorporates a scanning feature realized with a PSoC chip. It changes channels in the presence of noise or interference while maintaining data flow through detected clear channels. Message confirmation algorithms for channel scanning, transmitter-receiver synchronization and successful reception in the developed system are novel.
The HopeRF RFM22B RF transceiver module can work with FSK, GFSK and OOK modulation techniques. It communicates using the serial peripheral interface (SPI) serial communication protocol. The PSoC SPI block simplifies the programming of the RF module.
The primary device ensures that the data entered from the keyboard is transmitted through the first noiseless free channel. The secondary device captures the data from the primary device by scanning for free channels.
In a noisy environment, secure RF communication is ensured by circulating between the channels created with the developed algorithms. The primary, secondary and noise generator circuits, for which prototypes are demonstrated, support the frequency range of 240 to 960 MHz (the frequency range of 300 to 400 MHz is used for testing), and a general solution is given for a multi-channel system.
References
- F. Şahin, “Telsiz Haberleşme Standartları,” İstanbul Aydın Üniversitesi Dergisi, Vol. 7, No. 27, August 2015, pp. 15-30.
- E. Upton and G. Halfacree, Raspberry Pi User Guide, John Wiley & Sons, 2014.
- L. H. Crockett, R. Elliot, M. Enderwitz and R. Stewart, The Zynq book: embedded processing with the ARM Cortex-A9 on the Xilinx Zynq-7000 all programmable SoC, Strathclyde Academic Media, Glasgow, 2014.
- S. A. Mittal, “Survey on Optimized Implementation of Deep Learning Models on the NVIDIA Jetson Platform,” Journal of Systems Architecture, Vol. 97, August 2019, pp. 428-442.
- R. Mustafa, M. A. Mohd Ali, C. Umat and D. Al-Asady, “Design and Implementation of Least Mean Square Adaptive Filter on Altera Cyclone II Field Programmable Gate Array for Active Noise Control,” Proceedings of the IEEE Symposium on Industrial Electronics & Applications, October 2009, pp. 479-484.
- D. Molloy, Exploring BeagleBone: Tools and Techniques for Building with Embedded Linux, John Wiley & Sons, 2019.
- M. Hähnel and H. Härtig, “Heterogeneity by the Numbers: A Study of the ODROID XU+E big.LITTLE Platform,” 6th Workshop on Power-Aware Computing and Systems, October 2014.
- “STM32 32-bit Arm Cortex MCUs.” Web: https://www.st.com/en/microcontrollers-microprocessors/stm32-arm-cortex-mpus.html.
- R. Ashby, Designer's guide to the Cypress PSoC, Newnes, 2005.
- B. TaŞci and Y. Erol, “Wireless Elevator Call System Design with PSoC,” Proceedings of the International Conference on Applied Automation and Industrial Diagnostics, September 2019.
- B. TaŞci and Y. Erol, “PSoC Based Embedded Rf Link Design,” Proceedings of the 13th International Conference on Communications, June 2020, pp. 381-385.
- B. TaŞci and Y. Erol, “PSoC Based Illuminance Level Control for Panoramic Elevators,” Asansör Sempozyumu, October 2018.
- B. TaŞci and Y. Erol, “PSoC Based Touch LED Dimmer Design,” URSI-TÜRKİYE’2014 VII. Bilimsel Kongresi, September 2014.
- RFM22BW RF Transceıver, HopeRF, Web: https://www.hoperf.com/modules/rf_transceiver/RFM22BW.html.
- D. J. Goodman, P. Henry and V. Prabhu, “Frequency-Hopped Multilevel FSK for Mobile Radio,” The Bell System Technical Journal, Vol. 59, No. 7, September 1980, pp. 1257-1275.
- B. Xia, C. Xin, W. Sheng, A. Y. Valero-Lopez and E. Sánchez-Sinencio, “A GFSK Demodulator for Low-IF Bluetooth Receiver,” IEEE Journal of Solid-State Circuits, Vol. 38, No. 8, August 2003, pp. 1397-1400.
- Z. Wang, P. -Y. Chiang, P. Nazari, C. -C. Wang, Z. Chen and P. Heydari, P. “A CMOS 210-GHz fundamental transceiver with OOK modulation,” IEEE Journal of Solid-State Circuits, Vol. 49, No. 3, March 2014, pp. 564-580.