
The Future of Automotive Radar Testing with Integrated Simulation Software
Jungik Suh, Keysight Technologies, Santa Rosa, Calif.
Radar has played important roles in the automotive industry for many years, specifically for safety (emergency automatic braking system, blind spot detection and rear collision protection) and convenience (adaptive cruise control, stop-and-go and parking assistance). Radar’s role has since expanded to a higher level of contribution in the industry for autonomous driving systems.
To achieve flawless operation in critical missions, pressure on automotive radar tests has become higher. More complicated design and test solutions are required to characterize higher frequencies (77 and 79 GHz), wider bandwidths (2, 4 GHz and beyond), multi-antennas and other automotive radar technologies like micro-Doppler. Higher performance measurement equipment such as better Displayed Average Noise Level (DANL), higher dynamic range, frequencies up over 100 GHz, 4 GHz and wider bandwidth signal analysis, are helping automotive radar developers achieve their test goals. However, advanced and future automotive radar tests require integrated simulation and measurement solutions with powerful simulation software and high performance test equipment to solve more complicated test challenges.
Integrated Simulation and Measurement Solutions
Demand for high frequencies and wider bandwidths for automotive radar has continuously grown with the need for better target range resolutions and smaller, lighter sensors. To validate these high frequency and wide bandwidth automotive radar signals, test and measurement companies have introduced high performance signal analysis and generation solutions, such as the Keysight N9041B UXA signal analyzer.
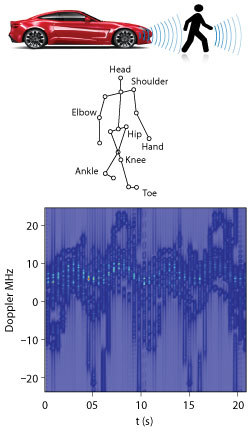
Figure 5 Walking passenger trajectory example with visualized micro-Doppler effect in SystemVue Automotive Radar Library.
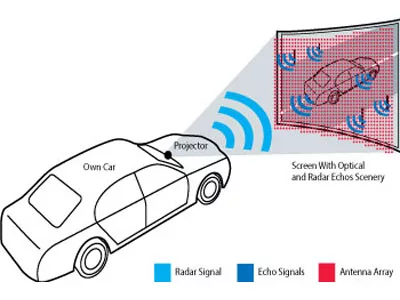
In addition to the need for high performance measurement equipment with wide bandwidth mmWave signal characterization capabilities, advanced automotive radar tests require more integrated solutions based on simulation and measurement for faster and more accurate development cycles. For example, multi-scatter target parameterized simulation models are available with the advanced automotive radar simulation software, such as Keysight W1908 SystemVue Automotive Radar Library, to realize and visualize the micro-Doppler effects on the target.
Automotive radar is a critical element of the autonomous driving system—by detecting traffic components around the vehicle, it should also be capable of distinguishing components of urban environments under a complicated scenario with a density of busy traffic from multiple components, including many pedestrians around the environment. Automotive radar with micro-Doppler can separate pedestrians from moving vehicles because when pedestrians are walking or running, they naturally move arms, elbows, hands, knees, toes and other parts of their bodies, which generate different micro-Doppler shifts from their torso. Advanced automotive radar developers will need to simulate and test micro-Doppler to validate their radar to detect slow-moving pedestrians. Considering the large number of complicated test scenarios with automotive radar, micro-Doppler target model simulation and test are quite critical regarding the impact to human lives.
In Figure 5, a walking pedestrian scenario is shown. New software solutions can visualize reflections such as the micro-Doppler signature in the spectrum with different scenarios, such as walking pedestrian, running pedestrian, moving car or even customized trajectory for special scenarios. It also provides >10 scatters for a walking passenger scenario to thoroughly model the micro-Doppler effect with the automotive radar.
After the simulation is complete, developers can generate waveforms and scenarios using test equipment, such as Arbitrary Waveform Generators (AWG), to directly create the signals from simulations as well as post-processed signals captured from test equipment, which accelerate the product development cycle from simulation to prototyping. As technologies used for automotive radar are becoming more complicated, this collaborative simulation software and measurement equipment solution will solve advanced and future radar tests like micro-Doppler.
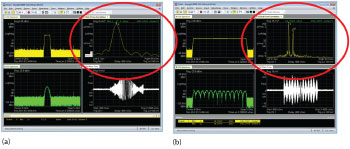
Figure 6 Comparison of 1 GHz (a) and 4 GHz (b) bandwidth radar tests—wider bandwidth test can validate two separate, closely spaced signals.
Why Arbitrary Waveform Generators?
As wider bandwidth testing is critical for advanced and future automotive radar, AWGs now play multiple roles in the testing process. AWGs can generate extremely wide modulation bandwidth, for example, from DC to 32 GHz, which enables engineers to discern targets even if they are close together. Since waveform generation in AWGs is digital, they can generate multiple signals—at different frequencies and at the same time (see Figure 6). This allows a realistic simulation of radar scenarios with multiple emitters transmitting simultaneously. Also, AWGs typically offer multiple, synchronous channels, allowing engineers to test multi-channel radar receivers and simulate, for example, a certain angle-of-arrival (AOA). With the RF signal coming straight from the DAC, the phase from pulse to pulse and channel to channel is 100 percent repeatable, which is important for consistent test results. Another benefit is the flexibility in terms of modulation formats—this is ideal to develop new modulation schemes that are more tolerant to interference. In addition, AWGs can generate the simulated signals directly downloaded from simulation software tools like SystemVue.
Future automotive radar tests require both software-based simulation and high-performance measurement equipment to improve radar performance and accuracy and reduce development time and cost. Advanced software is now available to help engineers create their own simulations with various example workspaces based on essential automotive radar scenarios: micro-Doppler, multiple target detection, antenna 3D scan, radar scene simulations with ground clutter (asphalt, cement or mud), pedestrian and multi-scatter target, direction of angle (DOA) degree calculation along with phase comparison, propagation loss under rain and MIMO radar.