
Remotely piloted air systems (RPAS) are vital to the execution of military operations, as recently borne out by Europe’s near neighbours in Libya, Mali, Syria and Iraq. Proliferation of RPAS is anticipated in the near future for 3D (dull, dirty, dangerous) missions (see Figure 1). Militarily, RPAS capabilities are being successfully applied to paramilitary applications such as border surveillance, maritime surveillance, crisis management and civil protection. Within the civil domain, RPAS usage is experiencing exponential growth from a small base of early adopters and a variety of markets: farming, filming, fire detection and a number of applications we haven’t yet discovered, as their costs are still prohibitive for RPAS or because the legislation doesn’t allow them yet.
Figure 1 RPAS favoured operations: dull, dirty and dangerous.
The RPAS market is forecast to grow continuously and multiply by roughly five times every five years.1 The opportunity for Europe is significant, with a conservative, lower estimate of the accessible RPAS sensor payload market of €17.4 billion and a higher growth estimate of €23.6 billion in the period from 2015 to 2035. Of course, this will only be possible if a sense and avoid capability is designed and manufactured in compliance with the dedicated requirements.
The higher growth case for civil and security RPAS sensor payloads predicts a pronounced market shift away from the historical military dominance of the RPAS market sector towards a more balanced market demand between military, security and civil – albeit over the longer term. The needs are identified but the means are missing.
For military RPAS, flying in a segregated area set up by a Notice to Airmen (NOTAM) is acceptable as long as the number is not tremendously high. However, with the growing market, cohabitation will become a major concern. This is the reason why the European Defence Agency (EDA) has launched the mid-air collision avoidance system (MIDCAS)2 study. To address the expected increase in numbers, more electronics will have to be devoted to safety concerns, at the cost of endurance.
For civil RPAS, France is the pioneer in Europe, creating the Conseil des Drones Civils RPAS civil councils in November 2014. The three newly created committees deal with regulation, technology and safety uses. A survey carried out by the Direction générale de l’aviation civile (DGAC) has counted more than 800 operators in France. There are now rules in France for mini and micro RPAS, which is also the case in 14 European countries. The number will continue to increase.

For mini/micro RPAS, the technology is mainly obtained by a spin-out from the toy and smartphone market. The command and control stations are derived directly from the phone or tablet world, as well as the payloads themselves (stabilized camera, low energy computer, MEMS, Wi-Fi communication, etc.). Existing applications are 2D and 3D maps or imagery and thermal models for building isolation assessment as well as land surveying, mining, mapping, agriculture, forestry, littoral conservation, media, site inspection, civilian safety and linear inspection of pipelines, railway and electric cables. The service market will grow in parallel.
Today, manufacturers are building optionally piloted vehicles (OPV) as mission systems that they intend to turn into true RPAS as soon as the certified solution for sense and avoid is available. Currently, no OPV has been certified for flying without a safety pilot on board. The only demonstration programme to be completed to date is SESAR,3 which was underwhelming as the safety case was “simple and it’s not a real unmanned aerial vehicle (UAV).” OPVs remain piloted aircraft, and their certification is not comparable with that of UAVs.
Being obliged to have a pilot has a direct impact on the size of the aircraft, which is obviously oversized, especially at the level of medium altitude long endurance (MALE) RPAS. Compared to tactical solutions which are optimized for the mission and can land on a semi prepared area, OPVs have to cope with pilot constraints (i.e., additional weight, instruments and human factors) as well as needing airports for landing.
RPAS are limited by the maximum take-off weight. The balance between the payload that can be flown and the carburant (i.e., petrol, batteries, etc.) that is needed to ensure a decent time on station is the parameter that has to be adjusted for efficiency. Regulation will force the incorporation of additional sensors to take care of collision avoidance or even better achieving “pass well clear,” a natural concern with the forecast in the number of aircraft increasing. No one wants to be responsible for RPAS casualties.
The only solution for staying competitive is to have light sensors, and integrated sensors are the best option. This article will now consider the different RPAS classes, the rules and certification constraints, the different solutions for sense and avoid and the weight estimation for separate sensors. The discussion will show how the performance and size, weight and power (SWaP) consumption of a multi-sensor suite could be improved thanks to collaborative tasks and resource sharing, and it will provide recommendations for decreasing the weight and increasing the functionalities.
ALL OF THEM ARE RPAS, BUT…
Today there are too many classes of RPAS – also called drones (from the low continuous humming sound produced when flying), unmanned aircraft systems (UAS) and UAVs. The way the classification is presented indicates the interest of the user, the manufacturer or the market development.
- Size: nano, micro, mini, small, medium, large
- Aerodynamic type: fixed wings, rotating wings, vertical take-off and landing (VTOL)
- Altitude: low, medium or high
- Altitude and endurance: medium altitude long endurance (MALE), high altitude long endurance
- (HALE) and low altitude long endurance (LALE)
- Level of operation: tactical, operative, strategic
- Mission: ISR, combat, support, etc.
- User: military, commercial, civilian
- Class: I, II, III, IV, etc.
- Operation mode: line-of-sight (LOS),beyond line-of-sight (BLOS)
However, these categories often include aircraft with very heterogeneous performance.
The performance characteristics of speed, endurance and maximum take-off weight are totally different and no one can expect that the same sense and avoid system can satisfy a 2 kg aircraft as well as a 4 ton one.
Also, the operating altitude is different and so are the missions. For example, being capable of detecting and avoiding overhead cables is required for low altitude missions but not for midair anti-collision systems. The small RPAS want to use the sense and avoid function to operate in a swarm; maneuverability, speed and detection range are not the same for all aircraft.
The segmentation is very wide, and different scenarios and rules are imposed according to the size and application of these kinds of systems. The requirements are not the same and the solutions will be different.
GOVERNING RULES
As per the International Civil Aviation Organization (ICAO) definition, the visual flight rules (VFR) are a set of regulations under which a pilot operates an aircraft by visually controlling the attitude and trajectory of the aircraft, navigating and maintaining separation with obstacles such as land, clouds and other aircraft. This must be done in visual meteorological conditions (VMC).
VMC are usually defined by certain visibility conditions, cloud ceilings (for take-off and landing) and cloud clearances. The exact requirements vary by type of airspace, whether it is day or night (for countries that permit night VFR) and from country to country. Typical visibility requirements vary from 1.5 to 8 km. VMC are the weather conditions required for flight under VFR (using outside visual references). The boundary criteria between VMC and instrument meteorological conditions (IMC) are known as the VMC minima.
In France, regarding small aircraft, RPAS under 150 kg are segmented depending on different scenarios:
- S1: direct visual line-of-sight above non populated area, with 100 m maximum distance from the pilot
- S2: above non-populated areas, with 1 km maximum from the pilot and with a height under 50 m from the ground or artificial obstacles
- S3: flights above populated areas, in direct line-of-sight of pilot, with a maximum distance of 100 m from the pilot
- S4: particular activities (geographic, video, aerial surveillance, etc.) above non-populated area and not included in the S2 scenario.
Regarding large RPAS, the U.S. Federal Aviation Administration (FAA) wrote an order (8130-34: Airworthiness Certification of Unmanned Aircraft Systems), then a UAS roadmap and a UAS comprehensive plan in October 2013; European rule 216/2008 defines the competency.
A wide range of scenarios can exist with widely varying performance characteristics, along with different types of aircraft in an operational environment when defining, size, speed, type of control and other flight capabilities, material properties and structural design standards, system reliability and other aircraft performance (at system and subsystem levels).
For the European RPAS steering group – the European group providing milestones for integrating RPAS into non-segregated airspace, following EDA study AIR4ALL – studies have to be carried out in relation to allowing flights in non-segregated airspace: data communication links, including spectrum issues; operational procedures; security issues; operational contingency procedures and systems; surface operations, including take-off and landing; detect and avoid systems.
The European EDA MIDCAS study has established sets of sensor capabilities to ensure flying in non-segregated airspace regarding detect and avoid capabilities. A demonstrator of this system has recently flown with electro-optic/infrared (EO/IR) combined with radar capacities for detecting non-cooperative intruders. This is complemented by automatic dependent surveillance broadcast (ADS-B) and identification, friend or foe (IFF) equipment to detect cooperative intruders – at the same time taking into account the non-cooperative tracks by means of heterogeneous data fusion. The best combination of only non-cooperative sensors was proven to be radar plus electro-optic.
It is envisaged that RPAS will operate in airspace and air traffic management (ATM) environments, in conjunction with a variety of manned aircraft (e.g., from gliders to large airliners), both under IFR or VFR, adhering to the requirements of the specified airspace in which they are operating – that is to say mainly by providing the pilot in command with information of distance to clouds. Formally speaking, according to the rules of the air, VFR flight encourages getting the distance to clouds in order to avoid entering instrument meteorological conditions (IMC).
A flight conducted under VFR must maintain a minimum distance from clouds and requires a minimum distance from the ground and surrounding obstacles. In a manned aircraft this is ensured by visual recognition and instruments. For RPAS, this should be achieved through an adequate set of sensors with enough distinctiveness to make valid decisions. This set of sensors will have to include multi-function radar capabilities for weight saving.
With regards to the functional architecture, the main functions needed for the RPAS are allocated to several segments as shown in Figure 2. Part of what was considered as a whole entity is now spread between the air segment and the ground segment, creating a rupture. There is a pilot, but he is on the ground, which means that the situation assessment, the reaction time and the consequences are not the same for him.
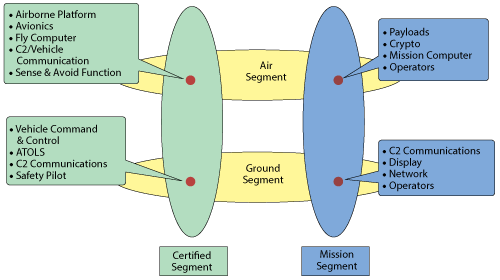
Figure 2 Main functions required for RPAS.
Comparing the RPAS architecture to an aircraft, there is a notion of “green aircraft” and a mission system that can be highlighted. The airworthiness constraints are now spread among the air and ground segments, making the certification more complex. Legally, in an aircraft, the pilot is responsible for the see and avoid. For an RPAS, it may not be the case as the pilot is on the ground and the data link could be interrupted. Sense and avoid must be achieved even when the data link is perturbed. An autonomous function is thus compulsory.
Today, without the sense and avoid function, the only legal solution is the segregation with a NOTAM and the use of a primary radar for situation assessment. STANAG 4671 20094 states “It is recognized that ‘sense & avoid’ is a key enabling issue for UAV operations.”
HOW TO SENSE AND AVOID
Sense and avoid detection is based on two kinds of function: cooperative and non-cooperative.
Cooperative Function: Among the possible cooperative sensors, ADS-B is particularly suitable for implementing sense and avoid. ADS-B is based on the publication of the UAV’s position on a dedicated network. It assumes that the Global Navigation Satellite Systems (GNSS) information is available, that the communication to the network is updated correctly and that all the flying systems are all equipped. The main characteristics are:
- Automatic: there is no interrogation needed to start the data or squitter coming from the transponder
- Dependent: it relies on on-board navigation (GNSS, altimeter, barometric altitude, inertial system) and broadcast equipment to provide information to other ADS-B users
- Surveillance: automatic surveillance and traffic coordination are required
- Available at long range, provided that aircraft are in line of sight
- All weather
One of the main problems in using ADS-B is linked to knowledge of the integrity of received data and that it only provides the published data, assuming that the surrounding aircraft are all fitted with ADS-B. The traffic collision avoidance system (TCAS) function is the automatic avoidance system used for manned aircraft and is the way forward for the big RPAS, when weight is less critical associated with a non-cooperative sensor. The IFF in Mode S is used for providing aircraft parameters (range, altitude, azimuth) and for ADS-B confirmation. Spoofing may be a concern in the future. Link 16 is used for situation assessment.
These systems are L-Band with separate boxes, antennas and with filters and blanking boxes to cope with compatibility. Building a single piece of equipment capable of all these functions will save weight and will simplify integration and will help with certification. The cables’ weight for aircraft installation has been measured and represents 15 percent of the total weight of the boxes. Building a multifunction L-Band system is clearly a challenge that could save half the weight by having common transmitters, common multifunction receivers and shared computer resources. It will also naturally take care of EMI/EMC compatibility. There is no risk of one of the L-Band transmitters polluting the other, if you only have one.
Non-Cooperative Function: Non-cooperative sensors are segmented into two solutions: electro-optical/infrared sensors and radar. Among possible non-cooperative sensors, the natural solution is optical detection as it mimics the pilot’s eyes, with the same advantages and limitations. Cameras are cheap, small and light and can easily be spread around the aircraft structure. This is true for mini RPAS, when the distance detection is increasing the weight and consumption growth proportionally. But the system is not all-weather and the speed measurement of the incoming objects is quite difficult to obtain; only the increasing number of pixels is noticeable.
Radar complements the imaging sensors: EO/IR sensing provides angular measurements with great accuracy and has a good data rate update, while the radar also provides distance and speed measurements. Data fusion achieves the best of both sensors. Moreover, the cooperative information is used for the data fusion.
For radar sensors there are two possible antenna technologies that can be selected. The first is mechanical scanning along the azimuth axis with digital beam forming along the elevation axis on receive. This approach is also referred to as the “moving solution.” The second is coloured emission combined with quantized E-scanning along the elevation axis on transmit, with digital beam forming along the azimuth axis on receive. This is also referred to as a “static solution.”5,6
Considering the band choice, X- and Ku-Band offer the best compromises between accuracy, weather robustness, available spectrum, cost and system weight. Ka-Band has been discarded as unsuitable for all-weather use. C-Band and lower frequencies have also been discarded, due to the available bandwidth for the sense and avoid function. Moreover, they are heavier and consume more space than X- and Ku-Band.
RADAR IMPLEMENTATION
One of the most advanced existing radars uses a patented Thales design based on electronic scanning (E-SCAN) and digital beam forming (DBF) (see Figure 3). The techniques and technologies which have ruled the proposed design all favoured decreasing the drag by minimizing the antenna footprint, easing the installation on board the aircraft and decreasing the weight compared to standard solutions. The result is a good, yet complex, fully integrated solution, which offers the best compromise within an affordable SWaP budget.
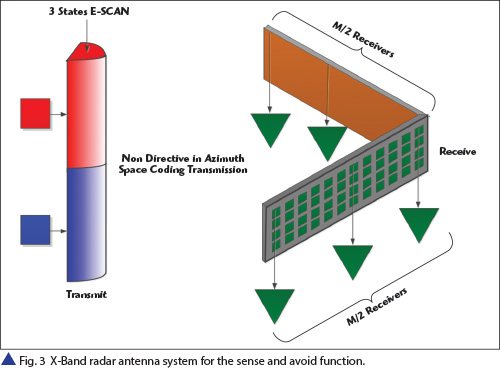
Figure 3 X-Band radar antenna system for the sense and avoid function.
The radar system operates in X-Band with an architecture based on coherent multiple-input-multiple-output (MIMO) principles.5,6,7 To decrease the size of the antenna, coloured transmission is implemented for measurement of elevation angles, which otherwise would not be possible. One of the advantages of operating in X-Band, rather than Ku-Band, is that the signal of the weather radar from airliners can be detected and the information incorporated in the fusion system to enrich detections. Cloud detection is also a most valuable function that needs to be included in future designs. Medium RPAS cannot afford to carry both the sense and avoid function and weather radar.
The signal processing can be installed at the back of the receiving antennas, for cable optimization, and the use of smartphone processors are a possible solution in the future. The use of conformal antennas as promoted by EDA8 can be envisaged; as the tools for building conformal antennas are not yet mature, they will probably be the next step after having certified the radar sensor for sense and avoid.
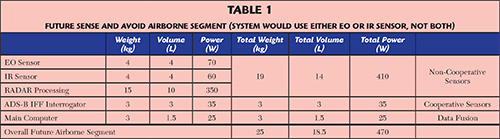
SWaP: LIGHT IS BEAUTIFUL
The figures shown in Table 1 are based on separate sensors and data fusion after detection. Three possible approaches can reduce these values. The first is through technology improvements, for example the use of new radar technology planned for AESA architectures. The second is a multi-sensor approach, using strong interaction and cooperation between the sensors, including compacting the sensors in the same units (direct gain) or offering increased functionalities while avoiding new sensors (indirect gain).
- Capacity for the radar system to detect clouds and give a measurement of the distance to clouds to the pilot in command, in order to fly VFR
- Detection of weather radar from airliners to compare with standard detection
- Use of optical technology, if possible merged within the radar panel9
The third approach is resource management sharing, e.g., RF chains or computing resources.
As most fixed wing RPAS are gliders, the consumption is small and could be just kilograms per hour – as little as 5 kg. The key parameter for the RPAS is the time on station. Take-off and landing, the time to travel to and from the mission area are not the interesting part of the flight, although necessary. The only parameter that can be adjusted is the time on station. If the payload weight is inflated by 5 kg, at least one hour of time on station is impacted (not taking into account the weight impact on the platform performance).
Although significant technological and regulatory advances have been made by the RPAS community, technology improvements and regulation development are still needed to fully understand the impact of RPAS operations in the non-segregated airspace.
Of course depending on the RPAS class, the problem is not the same, and thus the solution will have to be adapted. Technologically, efforts have to be made to decrease the weight of cabling and connectors, as the ratio of these elements is not negligible compared to the mission payloads. It represents more than 20 percent of the payload.
Another approach is sensor physical integration, being able to insert all cameras (EO/IR) within the antenna will save weight. In addition to SWaP benefits, smooth sharing of the processor resources between the EO/IR and the radar would improve system efficiency.
In clear visibility, detection from the radar giving Doppler detection and range could be managed without other refined computation. The optical sensor could then give the refined angular detection, getting rid of the burden of measuring the distance and the speed, which is quite complex for EO/IR and requires additional computation. Moreover, the distance being known, the focalization of the camera can be pre-adjusted to the correct value. For poor visibility, the camera computer resources will be fully allocated to the radar, preventing unused CPU resources.
For small aircraft with a weight less than 5 kg, the target weight for the sense and avoid function must be reduced to 200 g maximum; hopefully, the platform speed will also be reduced to less than 30 m/s. For these platforms, the only radar technology will be millimeter wave, which is also the technology selected by the automobile industry. Allocating 76 to 77 GHz frequencies to helicopters is now under discussion.
We could have envisaged simple equipment or a set of equipment ensuring RPAS airworthiness certification, enhancing system performance and physical SWaP characteristics and even being compatible with existing manned airplanes. However, this is a chimera and the specificity of each class of platform forces a dedicated solution by type of class.
FUTURE DEVELOPMENT
Performance trade-offs and development of standards will be the next step to be achieved, as the certification cost is too high for every aircraft manufacturer to achieve. The only pragmatic solution is to go through a standardization process, which will ease the approval by the regulation authority.
Sharing the requirements will allow technology driven improvement, e.g., by using MMIC designs, merging RF and optical front-ends as well as improved performance by cooperation at low level, thus drastically improving the SWaP of the sense and avoid function. Advanced studies still need to be funded at the European level to miniaturize critical components and increase the efficiency for decreasing the consumption.
This will be even more critical for small RPAS where the ratio of the sense and avoid function compared to the possible payload weight is the same order of magnitude. Here, using mass production elements and devices designed for smartphones, computers or cameras are credible options.
The use of standards will also simplify the regulatory approvals, together with their development, their tests and the performance validation. The use of standards will allow the building of representative simulation models, in turn simplifying the integration of the sense and avoid function in the RPAS.
The EDA will be a major player in facilitating an industrial standard for promoting an indigenous solution. The RPAS expansion is being held back by this function which is not yet available. Moreover, when it does become available it will be more likely be implemented in manned aircraft. Thus, the market for this product will not be limited to RPAS but will benefit all aircraft.
For European industry, it is necessary to promote innovation and competiveness in high-end engineering and technologies and to aggregate competencies to stimulate sustainable growth in the economy. Most of the leading edge technical and industrial capabilities already exist. This sense and avoid function is an essential condition for RPAS deployment.
Globally competitive sense and avoid systems can – through European governments and industry acting together – be delivered by the European industry affordably and to a schedule which will meet member states’ military requirements and respond to expected civil demand, thus facilitating a real growth in RPAS business. However, what is missing and difficult to achieve is the standardization (to obtain critical mass), a stronger cooperation between industries and the political will that is required if Europe wants to be liberated from RPAS dependencies.
References
- Those figures were obtained from an EDA study, “Non EU Dependencies: Investing in Key Unmanned System Technologies and Capabilities,” which ended last year and was performed by the consortium composed of TNO, THALES, SELEX and SAGEM.
- MIDCAS (Mid Air Collision Avoidance System) is the European Detect & Avoid project launched in 2009 by five contributing Member States (France, Germany, Italy and Spain under the lead of Sweden) under the framework of the European Defence Agency.
- SESAR (Single European Sky Air traffic management Research) programme is the technological pillar of the single European sky. It aims to improve air traffic management (ATM) performance by modernizing and harmonizing ATM systems through the definition, development, validation and deployment of innovative technological and operational solutions.
- STANAG 4671, Standardization Agreement: UAV Systems Air Worthiness Requirements, USAR, Ed. 1, 03-SEP-2009.
- Pascal Cornic, Patrick Garrec, Stephane Kemkemian and Laurent Ratton, THALES AIRBORNE SYSTEMS, “Sense and Avoid Radar using Data Fusion With Other Sensors,” IEEE Aerospace Conference, April 2011, http://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=5747514.
- S. Kemkemian, M. Nouvel-Fiani, P. Cornic and P. Garrec, “A MIMO Radar for Sense and Avoid Function: A Fully Static Solution for UAV,” 11th IEEE International Radar Symposium (IRS), Vilnius, Lithuania, August 2010, pp. 1–4.
- S. Kemkemian, M. Nouvel-Fiani, P. Cornic and P. Garrec, “MIMO Radar for Sense and Avoid for UAV,” IEEE International Symposium on Phased Array Systems and Technology (ARRAY), Waltham, Mass., October 2010, pp. 573–580.
- 13.R&T.OP.639, “UAS Conformal AESA Antennas Roadmap (UCAR)”
- Patent number FR201400003046, “Dispositif léger d’imagerie haute résolution multi senseurs à réseaux optiques et radar combinés et solidaires,” from P. Garrec, S. Formont and R. Montigny.

Patrick Garrec is RF sensors architecture expert at Thales Systèmes Aéroportés in Pessac, France. He is in charge of innovative development for UAV systems in Thales aerospace, including radar-based automatic take-off and landing systems. With more than 32 years experience in radar, Garrec’s main focus has been radar design, including air traffic control (ATC), battlefield and meteorological systems. He holds more than 30 radar patents. He received the Thales Innovation Award in 2008 and is a Senior Member of the Société de l’Electricité, de l’Electronique et des Technologies de l’Information et de la Communication. He received the Dipl.-Ing degree from the INSA Rennes and the Diplôme d’études approfondies (DEA) from the ENSM (now Ecole Centrale Nantes).