
Citizens increasingly expect access to Internet and wireless communications services whether they are at home, at the work desk, or on the move. Wireless connectivity is increasingly being offered to rail passengers where it is also often cited as an incentive to attract travelers to choose rail over other transport modalities.
When rail passengers use a wireless local area network (LAN) within the vehicle compartment, the connection of this LAN to the Internet backbone can present a significant technical challenge. Numerous competing requirements include the need for good geographical coverage and availability; quality of service; sufficient bandwidth; and a cost that is acceptable to the consumer. Solutions have included uni- or bi-directional satellite; bundled cell phone lines; wireless hotspots in stations; and combinations of these measures.1 Proposed solutions include WiMAX, for which a good deal of terrestrial infrastructure would be needed, high altitude platforms, for which the aeronautical technology is not sufficiently mature, and 3G mobile networks, which tend to lack sufficient geographical coverage. Satellite has emerged as offering the winning combination of coverage and bandwidth, either in isolation or as part of a multi-bearer solution.

Figure 1 Legacy satellite antenna on train (source: European Space Agency).
A broadband access service launched fully in Europe in 2008, following a trial phase supported by the European Space Agency2 and led by Thales and 21Net Ltd., uses a two-way satellite link in Ku-band. This relies entirely on a tracking reflector antenna on the train’s roof (see Figure 1). The radome height is 72 cm; this limits the number of railway routes where services can be offered due to the need for this headroom. Clearly, a lower profile scanning antenna would open up the scope for wider geographical availability of this service.
Lens Antenna
Solutions for scanning antennas are too numerous for a proper review to be feasible in this article but are often based on array techniques, either through mechanically scanned sub-arrays or phased array/beamforming techniques, and so inevitably suffer to some extent from scanning loss. Thus, arrays don’t always offer an acceptable combination of efficiency, scan performance and cost. This led to a re-evaluation of the scanning lens antenna as a lower profile solution while offering comparable efficiency to a reflector, i.e. a similar gain for a given aperture area. The spherical lens antenna is well-known for its scanning and multiple beam capabilities, and chief variants are the constant-index lens and the stepped-index or Luneburg lens. The former works well for modest aperture size, but the efficiency falls off for an electrically large lens. The latter offers very high efficiency in theory, but is problematic to manufacture: The use of many concentric dielectric layers and eradication air gaps between them are difficult to achieve. A beneficial variant is the use of a hemispherical lens above a ground plane since this yields an equivalent aperture diameter, but in half the height. The current work was particularly inspired by a two-layer stepped-index hemispherical lens antenna that was developed for Ka-band.3,4 This used readily available dielectric polymers and achieved a measured gain in the region 35 dBi at 28 to 31 GHz from a diameter of 236 mm, being an estimated aperture efficiency of 68 percent. This article will describe how this lens design was scaled in size and frequency and combined with a mechanical scanning system to allow independent beam steering of two primary feeds, thus offering satellite diversity.
First Design Phase
The project comprised two main strands: The development of a 61 cm stepped-index lens based on the electromagnetic design of the Ka-band scale model; and development of the mechanical scanning system. To a large extent these two strands were pursued independently and brought together towards the end of the program. This also de-risked the problem of fabricating the polymer lens, since the mechanical system could also be used with a commercially available Luneburg-type lens. The end goal was a prototype suitable for demonstration of proof-of-concept and feasibility of use rather than a commercial offering.
The mechanical design began with a ‘clean sheet’ and a number of configurations were considered. A key driver was minimizing the antenna height and so any geometries where components were placed below the ground plane were rejected. Accelerometer data from earlier railway trials were examined so as to derive the required maximum beam steering acceleration and velocity; these figures are summarized in Table 1.
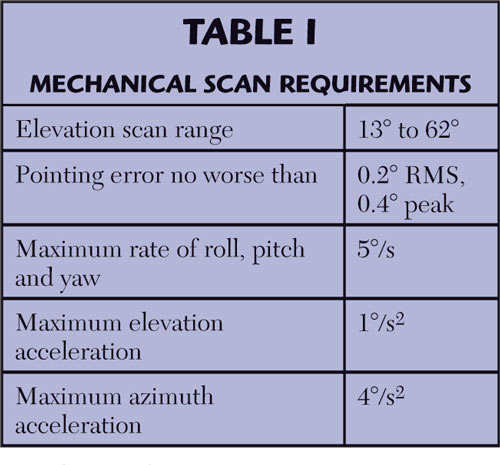
Table 1 Mechanical scan requirements.
The elevation scan range was derived from the anticipated extremes of latitude for rail routes within Europe, to which was added 7° to accommodate maximum train pitch and roll angles. The initial mechanical concept is sketched in Figure 2 where some basic features were established:
- Each feed runs along an elevation rail, driven by a timing belt
- Two elevation arms attached to a shared azimuth rail
- Elevation and azimuth motors fixed to azimuth carriage and move with it
- Height must be minimized, but lateral space is assumed not to be a major constraint
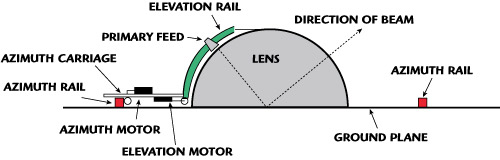
Figure 2 Basic mechanical scanning concept, elevation view.
In this configuration the major components move with the azimuth carriage and thus never obstruct the opposite side of the lens and ground plane. In contrast, fixing components such as motors to the ground plane would lead to aperture blockage for certain azimuth beam steering angles. Thus, only the azimuth rail blocks the aperture, and so it is advantageous to place it at a reasonable distance from the lens edge.
Detailed Mechanical Design

Figure 3 Azimuth rail, interior side.

Figure 4 Elevation scematic of components carried by carriage and azimuth rail.
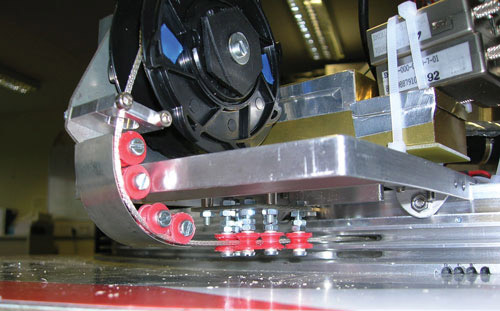
Figure 5 Cable reel and guides on exterior side of azimuth rail.
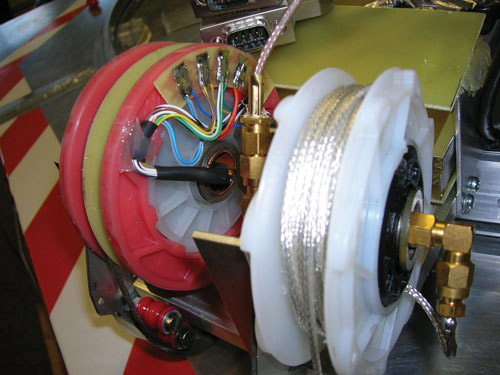
Figure 6 Slip ring (left) and rotary joint (right) installed in cable reels.
Having established a basic geometry, this was worked out in proper detail. The mechanical and RF requirements were often competing and thus compromises had to be established. The elevation and azimuth rails are among the most complex and important geometries, being curved components that perform numerous functions. The azimuth rail in particular houses the toothed rack and magnetic sensor strip on the interior side (see Figure 3) and vertically stacked cable guides on the outside face. Routing a number of flexible cables proved challenging since there are three IF circuits (one for Ku-band receive, one each for Ka-band transmit and receive) and one control circuit. Accordingly, each of the two azimuth carriages carry two cable spools and the cables are guided into the slots on the azimuth rail by a system of small pulley wheels, illustrated in the lower left region of the elevation view drawing of Figure 4. The first iteration of the cable feed system is also shown in the photograph of Figure 5, here shown parked opposite the aperture where the cables are routed through the azimuth rail. As the carriage scans to the left or right of this region, the cables are laid in the grooves in the azimuth rail. Also just visible in this image (lower right) are four holes through which coaxial cables are routed to the exterior, thus avoiding placing any components below the ground plane. Figure 6 shows the slip ring (left) and RF rotary joint (right) installed and connected in the final version of the cable spools.
The aperture blockage caused by the azimuth rail (highlighted red in Figure 4) gave some concern, since this would introduce a scanning loss at low elevation angles. However, these components had to be procured very early in the design and construction phase and hence for this first iteration had a conservative design that can accommodate a range of cable thicknesses and the magnetic sensor which ultimately may be dispensed with. Measurements on a scale model at 30 GHz indicate that the scanning loss caused by this version of the azimuth rail is only measurable as the elevation angle approaches 30° or less, and at 18° would be about 1.5 dB. This could be reduced by slimming down the height of the rail. A more elegant solution could use optical IF distribution for the aggregate 5 GHz of IF bandwidth, thus reducing the reliance on coaxial cable. This approach has been studied for a future phase.

Figure 7 Fully assembled electro-mechanical system.
Figure 7 shows the electromechanical system fully assembled, shown around a dummy lens. The main components and features are labeled. The two independently steered beams allow for the operator to use satellite diversity. The minimum relative satellite azimuth is limited by the relative positions of the two primary feeds and increases with increasing elevation angle, the worst case being an azimuth spacing of 21°. Thus, satellites more closely spaced than this cannot always be used simultaneously.
In the present design, there is a Ku-band receive only beam, which is the most straightforward and uses a low cost domestic satellite TV low noise block converter as the feed. This produces an IF output at 900 to 2100 MHz, which is routed via spooled coaxial cable and RF rotary joint to an exterior receiver. The other beam is intended for two-way communications at Ka-band, namely a 20 GHz receive and 30 GHz transmit frequency plan, as used in the US by domestic two-way satellite Internet services, and soon to be offered in Europe following the launch of HYLAS, the ‘highly adaptive satellite’5 that will have both Ku- and Ka-band transponders. For the two-way beam, two IF circuits are needed and these are also distributed by spooled coaxial cables. A Ka-band VSAT transceiver was adapted, this being a convenient short cut to demonstrating the required functionality. This unit needs to be placed as close to the feed as possible to minimize interconnection losses, and has been housed on the azimuth carriage. Flexible cables route the 20/30 GHz signals to the feed and introduce a minimal loss of less than 1 dB. An orthomode transducer is used at the feed.
Motors and Interfaces, Power and Control
Servo motors are used for the azimuth and elevation drive, i.e. where maximum torque and acceleration can be employed using feedback control rather than open-loop steppers. The azimuth motors carry more load and are thus higher power items than the elevation motors. In-line gearboxes are used. The Maxon motors are each controlled via a Maxon ‘EPOS’ unit, a modular-designed digital positioning system suitable for electronically commutated motors. Each motor is fitted with an incremental shaft encoder giving the ability for position resolution to 1/2000 of a turn. The EPOS units use auto-tuning software to enable the individual motor current, velocity and position gains to be adjusted for optimal regulation, which helped speed up the integration of the motor drive system to the antenna system.
The four individual EPOS control units connect to a common two-wire Controller Area Network (CAN) bus. The same CAN bus is also used for the interconnection of the other microcontroller systems so each unit becomes a CAN node. The CAN bus is ideal for this application, requiring very few conductors to form the bus; it is thus light weight and the cables can be both small and flexible minimizing motor load. In the present design the CAN cable is also spooled, which is why a total of four spools are used. Ultimately, the CAN signals could also be carried over RF and thus share one of the IF coaxial cables, which would reduce the total number of cables needed. The CAN bus was initially designed for use in motor vehicles and as such has a fast robust communication protocol that efficiently handles errors. The final deployment of this type of antenna system will be into an environment with a large amount of electrical noise due to the close proximity of the train pantograph and the overhead power line; the CAN bus is well suited to this environment. The protocol has several error detection strategies to avoid invalid data being acted upon. Individual CAN nodes also have the ability to determine fault conditions and transition to different modes based of the severity of the problems being encountered, if necessary even removing themselves from the bus in order to maintain bus integrity.
DC Power
Power to each of the azimuth carriage assemblies is fed via a spooled multi-core cable and slip ring, the DC power being decoupled from the RF signals. The DC power is supplied at a voltage level of approximately 30 V. Although this level is not directly required with the antenna system, the use of the high level reduces the transmission losses in the feed cable. After filtering to remove electrical noise including transients, the high level DC is transformed to the various required low voltage levels by means of switch mode power supplies. The peak current drawn by the motor system does not exceed 600 mA.
Magnetic Linear Measurement System
In order to measure the overall accuracy of the Maxon motor control system and if necessary to provide an input to the final control loop, the prototype system incorporates an Elgo magnetic linear measurement system. This gives very precise (~micron) linear measurement and was used mainly to characterize the precision of the motor system. Ultimately, a magnetic system is probably not needed because the accuracy and reliability of the motor system is very good. Thus, a complex closed-loop control system, whereby a positional measurement is made after a command to move is issued and any necessary correction implemented, should not be necessary because of the high confidence that the magnitude of any such correction term will always be insignificant.
Development of 61 cm Stepped-index Lens
The two-layer hemispherical lens geometry, although conceptually simple, proved very difficult to implement with the required dimensions. In parallel with the development of the mechanical system, various approaches to lens manufacture were examined. Specialist moldable dielectric products (including syntactic foam) were investigated, but they could not be obtained in an uncured state. Anticipating use of such materials, a set of aluminum molds was also acquired. Another promising lead was the use of polyurethane foam, where dielectric constant varies roughly linearly with the polymer-to-air ratio. For a while this looked like a solution that could be manufactured at low cost by molding. Ultimately, however, following a number of measurements on various samples of this material, the loss tangent appeared to be too high to meet the requirements so this line of enquiry also had to be abandoned. Possibly the best material for this application would be an “artificial dielectric” such as ceramic-loaded low loss foam,6 but these are not readily available and really need further development. Finally, the investigation returned full circle to pursue manufacture from polymer billets of polyethylene and Rexolite. As a polyethylene billet of sufficient thickness could not be obtained, a pseudo-billet was fabricated by bolting together two thick slabs. This was then turned into the lens outer layer on a large CNC machine. The Rexolite inner hemisphere was machined from a single billet.

Figure 8 Receiving satellite TV at 11 GHz.
Figure 8 shows the lens in use with a domestic satellite TV receiver. Also shown is a conventional dish antenna of average diameter 62 cm. The received signal strength from 10.7 to 12.5 GHz was found to be equivalent for both dish and lens. A commercially available quasi-Luneburg lens was also used for comparison that comprises 7 layers of polystyrene foam according to traditional principles.7 While this worked reasonably well, the received power was on average 2 dB lower than for the dish and two-layer lens across this frequency band.
Measurements and Results

Figure 9 Outdoor mobile test laboratory.
To complete the antenna build, the two-layer lens was integrated with the mechanical scanning system. The gain was measured for various carrier frequencies using an outdoor range. The experimental arrangement is shown in Figure 9 where the antenna can be seen inclined on a jig, which allows for alteration of the feed elevation with respect to the ground-plane.
Measured results are summarized in Table 2. The gain and sidelobe levels do vary slightly with the azimuth and elevation angle, and particularly at low elevation where the azimuth rail partially blocks the aperture, as described previously.
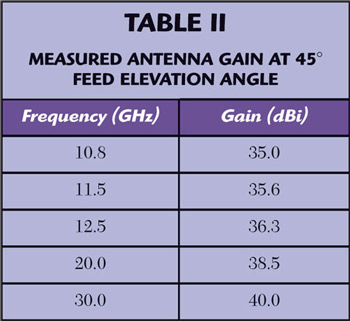
Table 2 Measured antenna gain at 45° feed elevation angle.
Typical radiation patterns are shown in Figures 10 and 11. The requirement on sidelobe levels is from Eutelsat Standard M, which is known to be challenging. The Ka-band performance does drop off at 30 GHz, which is also expected from theory. At this wavelength the layered lens structure is very coarse, and could be improved by increasing the number of dielectric layers. This effect has been quantified from theory where the computational effort using the spherical wave expansion technique becomes quite intense. Nevertheless, a 3 layer structure has been identified that should offer 67 percent aperture efficiency in theory. Construction of such a lens was beyond the present scope, however. The measured gain at 20 and 30 GHz is at the OMT waveguide port and does not include the additional 1 dB of cable loss to the transceiver. However, this would be overcome by placing amplifier modules within the feed/OMT, an implementation detail that was also beyond the current scope.
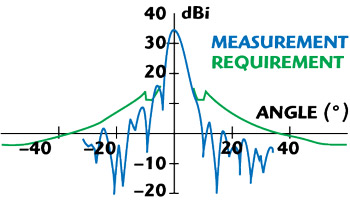
Figure 10 Radiation pattern at 10.8 GHz, H-plane.
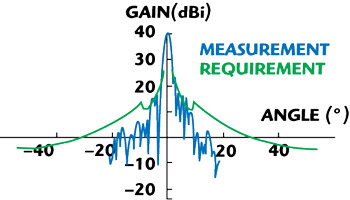
Figure 11 Radiation pattern at 30 GHz, H-plane.
The mechanical performance exceeds the requirements and positional accuracy is at least 0.1° in both azimuth and in elevation. Maximum angular speeds also exceed the requirement.
Conclusion
A mechanically scanned, two-beam hemispherical lens antenna has been successfully developed. The intended application is two-way satellite communications to trains, enabling wireless services to passengers. Effort was prioritized on the most novel aspects of the antenna that fall into two broad strands: Development of the 61 cm diameter stepped-index lens; and the two-axis scanning system for two independent feeds along with cable routing for concomitant IF circuits, power distribution and control bus. Other features that would be required for a final deployment of the antenna, but which were not considered to require particular innovation, include environmental housing, inertial control system, etc., and these fell out of the scope of this work.
The antenna’s electrical efficiency met the requirements for Ku-band applications and here offers efficiency comparable to a 62 cm diameter parabolic reflector in a height profile that could be as low as 32 cm, offering advantages for deployment on high speed trains where headroom is constrained. Ka-band performance was adequate at the receiver frequency of 20 GHz, while for transmission at 30 GHz improvement would be sought on the measured gain by developing a three-layer lens for this frequency. The azimuth rail introduces a scanning loss at low elevation angles of 1 to 1.5 dB (depending on angle and polarization), an effect studied in some detail through scale model measurements so as to quantify improvements that could be made through slimming down the height of this structure.
Maximum achievable beam scan speeds exceed requirements by a factor of 2 and angular precision is excellent at 0.1°. In future work the goal is to add an inertial control system and demonstrate real-time satellite connectivity on a moving vehicle.
Acknowledgments
Thanks to the technical staff in the Department of Electronics: Mark Hough, Mike Cornwell, Andy Patterson and John Clapham; and in the Department of Physics to Brent Wilkinson and Leigh Crosby. Thanks also to Agemaspark Ltd. The support of the European Space Agency under contract no. 20836/07/NL/CB and that of the program manager Maarten Van Der Vorst is gratefully acknowledged.
References
1. P. Bates, “Continuity of Coverage - A Multi-bearer Approach to Broadband for Trains,” IET Seminar: “Broadband on Trains,” London, UK, 20 February, 2007.
2. European Space Agency - Broadband to Trains, http://telecom.esa.int/telecom/www/object/index.cfm?fobjectid=24163 (accessed 27 February 2009).
3. J. Thornton and T.C. Tozer, “Lens Antennas for Multi-satellite and Multi-frequency Band Communications on Trains,” IET Seminar: “Broadband on Trains,” London, UK, 20 February 2007.
4. J. Thornton, “Wide-scanning Multi-layer Hemisphere Lens Antenna for Ka-band,” IEEE Proceedings on Microwaves, Antennas & Propagation, Vol. 153, No. 6, December 2006, pp. 573-578.
5. British National Space Center, http://www.bnsc.gov.uk/5920.aspx (accessed 27 February 2009).
6. J. Kot, et al., “A Spherical Lens for the SKA,” Experimental Astronomy, 17(1–3), pp. 141-148.
7. M. Rayner, “Use of Luneburg Lens for Low Profile Applications,” Datron/Transco Inc., Microwave Product Digest, December 1999.
John Thornton is a Research Fellow in the Department of Electronics having moved to the University of York in 2000. Between 1995 and 2000, he did research work at Rutherford Appleton Laboratory (UK) and later at the University of Oxford (UK) on diverse projects related to microwave engineering, space science and communications, prior to which he worked in industry. He has a master’s degree in physics and completed a PhD degree with the Open University in 2002. His current research includes scanning antennas for communications applications.
Andy White has over 25 years’ experience in the electronics industry. He currently leads a team of engineering support staff in the Department of Electronics at the University of York. He focuses his time on the management of large electronics projects. His areas of expertise include embedded system design, microcontrollers, FPGA, HALT, high level communication systems, logistics and trials management.
Graham Long was the manager and founder of the York Electronics Centre, set up at the University of York in 1980. He has broad experience in electronics, industrial applications, machine vision systems and measurement instrumentation, and has also project managed collaborative EU research programmes. The Centre undertook feasibility studies and electronic product equipment design, and many projects were carried out in liaison with other university staff. Since his retirement in 2008, he has continued to work as a private consultant.