
Ultra-wideband (UWB) is an RF wireless technology that could enhance advanced driver assistance systems (ADAS) and connected autonomous vehicle (CAV) sensor suites. The addition of UWB could increase the number of lives saved by avoiding deadly collisions and ensuring the trusted rollout of vehicle-to-everything (V2X) connections.
Technology advancements are changing our everyday lives and significantly impacting whole industries. This holds true for the automotive industry, which continues to adopt new technologies to enhance consumer experiences, safety and security. Among today’s biggest concerns are severe traffic collisions, an area where technology can be applied to save lives. Many efforts are underway to define, develop, standardize and implement the best technologies to improve road safety. Initially, manufacturers have used stand-alone ADAS technologies inside vehicles, such as radar and cameras. With these technologies, each manufacturer could implement its own system without the need for standardization.
The next big leap in safety will be for vehicles to share information, enabling them to cooperate with each other. This will require standardization to ensure connectivity of vehicles from different manufacturers. Efforts are underway to provide the basis for connected vehicles by standardizing V2X connectivity, including vehicle-to-vehicle (V2V), vehicle-to-infrastructure (V2I) and vehicle-to-pedestrian (V2P) protocols. V2X standardization efforts open the way for the adoption of new technologies that enhance the ADAS and CAV sensor suites.
UWB is a low-cost RF technology that can be used to accurately measure the distance between two points. This leads to the perfect marriage: UWB + V2X. The adoption and standardization of UWB + V2X can add capabilities, including precise positioning, secure identification and ultra-low latencies at high update rates. This article will focus on a few critical life-saving applications of UWB + V2V and UWB + V2P. However, it is important to note that there are also many applications where UWB + V2I could greatly improve consumer convenience, such as automated valet parking and alignment with electric vehicle chargers.
UWB TECHNOLOGY
IEEE 802.15.4z provides a specification for the standardization of UWB for secure ranging. The security aspects of the standard ensure distance measurements are accurate and not spoofed by external sources. UWB secure ranging works by measuring the time it takes for very narrow RF pulses to travel from a transmitter to a receiver. This “time of flight” is multiplied by the speed of light to obtain the distance. Narrow pulses enable the system to accurately understand multi-path interference and choose the first path, ensuring identification of the nearest object.
Many pulses are grouped together to form frames. Each secure ranging frame contains a scrambled time stamp, which is created using cryptographic techniques to ensure the reliability of the distance measurement. A single frame can be transmitted in less than 200 µs. Frames are sent back and forth between the transceivers of all nodes in a group, providing round-trip distance measurements between all nodes. For a simple one-sided, two-way ranging operation, round-trip measurements can be completed in under 1 ms, enabling an update rate of 1000/s.
UWB operates with a bandwidth greater than 500 MHz and, when coupled with the proper signal processing techniques, can provide distance measurements with an accuracy down to 10 cm. All these capabilities can be implemented on a single low-cost CMOS device. More background information and an overview of UWB technology can be found in the Qorvo publication Ultra-Wideband for Dummies.1
COOPERATIVE DRIVING
The automotive industry is beginning to envision its connected future, ushering in a new era of cooperative autonomous driving. This includes use cases such as group start from traffic lights, intersection crossing, vehicle platooning and merging between lanes. These use cases require knowing vehicles’ relative position to an accuracy better than 1 m and down to 10 cm in some cases. By sharing accurate positioning information, vehicles can work together to perform these functions more safely and with faster reaction times than a human, allowing them to operate with minimal or no human intervention.
One of the basic functions of V2V communications is the exchange of basic safety messages (BSM) in the U.S. or cooperative awareness messages (CAM) in Europe. These messages include information such as vehicle position, speed and heading. From this rough positional data, a vehicle’s autonomous navigation system (ANS) can determine which other vehicles are in the vicinity. Groups can then be formed for cooperative maneuvers.
In complex cooperative maneuvers of connected vehicles, maintaining proper separation is imperative to avoid fatal contact between vehicles. According to the 5G Automobile Association (5GAA), a global organization working on future connected mobility and intelligent transportation solutions, precise positioning is one of the critical problems to be solved. Keeping vehicles separated requires technology that can provide exact position measurements with fast update rates.
UWB can perform this function with accuracy down to 10 cm, which is one of the reasons the technology is growing globally. UWB can also save lives by preventing collisions between vehicles and vulnerable road users (VRUs) such as bicycles, motorcycles and pedestrians. UWB is rapidly proliferating in many consumer products and applications. Many of the leading cell phones include UWB, and the technology is being added to cars to enable phones to act as secure digital keys.
Wouldn’t it be great if UWB in vehicles and UWB in cell phones could be used together to save lives? If a vehicle could talk to a pedestrian’s cell phone (V2P) and use UWB to measure the distance between them, then vehicle-pedestrian collisions could be avoided. UWB can increase the security of communications by preventing malicious spoofing, which is a significant concern with CAVs. By verifying a vehicle’s ID and position, UWB can validate communications are with the intended vehicle instead of someone impersonating that vehicle for malicious purposes. Recent reports have demonstrated the impact of costly infrastructure blackmail exploits that have compromised many systems and led to loss of service. Can you imagine traveling down the highway in a CAV and receiving blackmail demands to pay or else the vehicle might be crashed?
UWB WITH LARGE OBJECTS
Most of the literature about UWB focuses on determining the distance to a small object. But when UWB is applied to large objects such as vehicles, knowing the distance to a single point somewhere on the vehicle is not adequate. In the case of moving vehicles, the measurements must be relative and continuous. Using multiple UWB sensors, each vehicle can continuously calculate the relative position of all four corners of another vehicle. Throughout the rest of this article, the term position will refer to relative position.
For a cooperative maneuver, the ANS could identify the appropriate vehicles and form a group using the V2V link. After a group has been formed, the ANS would identify, initialize and start continual measurements with the appropriate UWB sensors, again using the V2V link. Figure 1 shows how UWB sensors near the corners of two vehicles could form a crossbar arrangement. With two sensors located on each of the front, rear and side surfaces of each vehicle, the position and orientation of both vehicles could be determined. Each of the UWB links provides a unique, secure method of measuring the precise distance, as well as supporting data communications. Data communications can further enhance security by enabling the exchange of additional details.

Figure 1 Two vehicles using an UWB crossbar connection.
SAFETY AT HIGH SPEED
During high speed maneuvers involving several vehicles, it is vital that the CAVs function without failure. One common example is platooning (see Figure 2), where several vehicles travel in tight formation, drafting each other to save fuel. Platooning will help the trucking industry increase safety while reducing fuel costs and emissions, as well as reducing congestion and delivering goods faster. It could also help maximize the range of electric vehicles with limited battery capacity.
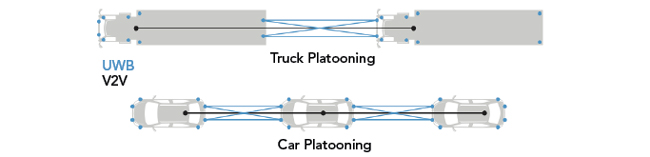
Figure 2 Vehicle platoon using UWB to maintain separation and orientation.
UWB links enable platooning vehicles to accurately measure the distance between them and maintain proper separation and orientation. In a platoon, each vehicle follows another at a close distance. Reaction time is critical. If the platoon is traveling at 60 m/s (135 MPH) and the separation between the vehicles is 6 m (20 ft), vehicles in the platoon must react in less than 100 ms to avoid a collision if the lead vehicle suddenly applies its brakes. This can easily be achieved with UWB.