

New technologies developed for modern applications continually advance the design and performance standards of civilian and military radar systems. Excluding the impact of COVID-19 in 2020, passenger air travel has increased between 4 percent and 8 percent every year for the last 10 years, while military radar systems are under constant pressure to counter increasingly sophisticated threats. As radar systems continue to evolve, the demands on instrumentation used to test these advanced radar technologies have never been greater. While the test requirements vary depending on the type of radar system, RF power measurements remain a constant, indispensable element to verify radar performance. This article provides an overview of RF power measurements critical to the proper operation of today’s radar systems, as well as the state-of-the-art in related test equipment.
DISTANCE MEASURING EQUIPMENT AND DOPPLER VHF OMNIDIRECTIONAL RADAR
Used as a navigational aid, distance measuring equipment (DME) helps pilots determine the line-of-sight distance (specifically the slant range) between an aircraft-installed DME and ground-based equipment. The onboard DME first sends an interrogation pulse to the ground station on a designated channel, usually within the frequency range of 960 and 1215 MHz. Pulse spacing and carrier frequency are both determined by the channel assignment. The ground-based DME then sends a reply pulse to the aircraft equipment after a known delay, however, the signal follows specific spacing and is transmitted at a frequency offset by 63 MHz from the initial interrogation frequency band. The time it takes the radio signals to travel to and from the ground station is used by DME aviation systems to determine the slant range value, which assists with air traffic control responsibilities such as flight paths, aircraft descent, landing procedures and other navigational needs. DME is utilized throughout the aviation industry, adhering to specific standards defined by specialized agencies such as the Radio Technical Commission for Aeronautics (RTCA), International Civil Aviation Organization (ICAO), and European Union Aviation Safety Agency (EASA).
A ground station with just a DME transponder is permissible on its own, however, this equipment is typically coupled with additional ground-based technologies to provide further, two-dimensional navigational information to an aircraft. For example, DME collocated with a Doppler VHF Omnidirectional Range (DVOR) transmitter is a common pairing at a single ground station. Operating in a paired frequency range, DME/DVOR systems can determine both the slant range and azimuth angle of the airborne interrogator with respect to the ground station. Military pilots can receive two-dimensional navigational data similar to civilian VOR/DME ground stations by utilizing a VOR station collocated with military tactical air navigation (TACAN), referred in combination as VORTAC.
DME/DVOR RF MEASUREMENTS
There are two fundamental types of measurements for most radar systems, including DME/DVOR: RF pulse fidelity (i.e., pulse shape) and RF pulse train spacing. To accurately measure the shape of a pulsed signal, the response of the measuring circuit must be as fast or faster than the pulse’s rate of change in amplitude. In many cases, the greatest rate of change occurs at the rising or falling edge of the pulse. Diode-based RF peak power sensors use a low-impedance load across the smoothing capacitors, which enables the capacitors to rapidly discharge when there is a drop in RF amplitude. This behavior, in combination with a very small smoothing capacitance, permits peak power sensors to achieve fast rise times. Currently, the state-of-the-art rise time in power measurement instrumentation is 3 ns, which facilitates reliable and accurate tracking of envelope power and other essential metrics to satisfy the evolving, complex demands of advanced radar systems. To simplify the process for instrumentation users, many RF power meters/sensors provide automated pulse measurements that include parameters such as: pulse width, rise time, fall time, period, pulse repetition frequency (PRF), duty cycle, off time, waveform average, pulse average, pulse peak, overshoot, droop, pulse top power, pulse bottom power, and edge delay (see Figure 1).
 |
 |
| (a) | (b) |
Figure 1: A pulsed signal (a) and related pulse measurements (b).
The spacing between DME/DVOR pulses is deliberate and maintaining that spacing is essential. Therefore, it is critical to be able to accurately measure the pulse timing. Superior time resolution (the state-of-the-art time resolution in power measurement instrumentation is 100 picoseconds) not only confirms proper spacing between pulses, but also enables more stable triggering and can reveal waveform nuances that may have otherwise been masked. As seen below, Figure 2a utilized an advanced test instrument with 100-ps time resolution, which accurately exposed a higher overshoot at the beginning of the pulse as well as some subsequent ringing. Compare this to the screenshot on the right (see Figure 2b), which failed to capture the overshoot and ringing due to using an instrument with inferior time resolution capabilities. Utilizing test equipment with leading performance is critical since the overshoot in this case could put the radar amplifier into compression or desensitize the radar receiver if not properly taken into consideration.
 |
 |
| (a) | (b) |
Figure 2: Overshoot and ringing exposed with 100 ps time resolution (a), which was masked by test equipment with inferior time resolution capabilities (b).
IDENTIFICATION FRIEND OR FOE & SECONDARY SURVEILLANCE RADAR
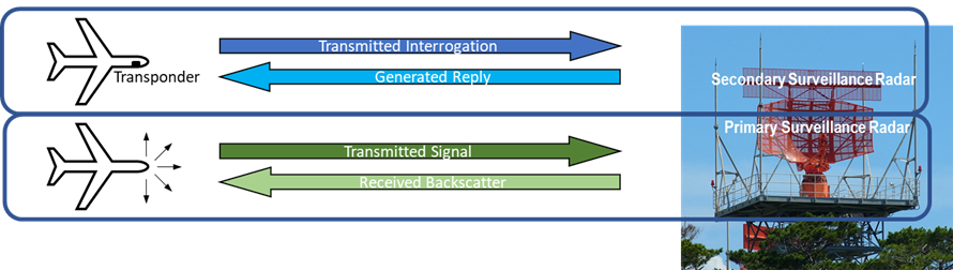
A related radar application involves identification friend or foe (IFF) radar and secondary surveillance radar (SSR) systems. IFF is used by the military as a radar-based identification system, and led to the creation of SSR for air traffic control of commercial aviation. SSR complements primary radar systems. Primary radar signals are first transmitted from a ground-based antenna. The radar pulse is reflected back from the aircraft and captured again by the ground-based radar antenna (see Figure 3). Primary radar gathers aircraft bearing and distance by measuring the time interval between the initial transmission and detection of the reflected radar signals. While primary radar relies on signal reflections, SSR depends upon a transponder to be onboard an aircraft. Acting as a radio receiver and transmitter pair, the transponder receives an interrogation signal from an interrogator (typically a ground station with collocated SSR and primary radar equipment), which requests specific information. The transponder then transmits an encoded signal as a response that contains the information requested. SSR provides additional, more detailed information about an aircraft or target, such as pressure altitude and identification code. However, since SSR uses both an interrogator and a transponder-equipped aircraft, both sub-systems require thorough testing for proper operation.
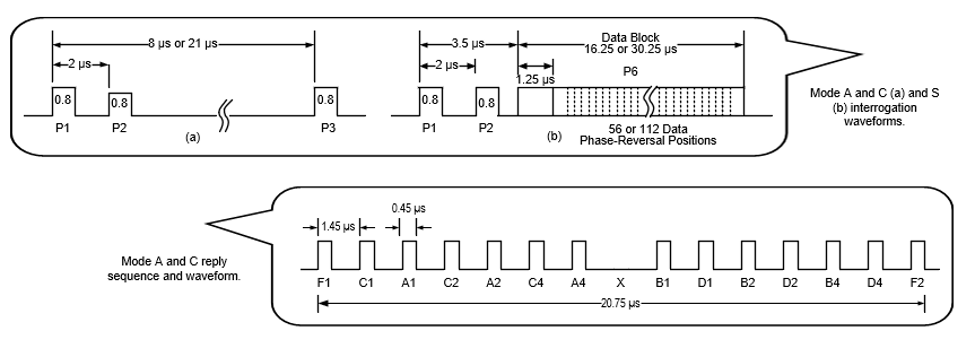
The interrogator doesn’t always send the same interrogation signal each and every time. These waveforms can vary, classified by various modes that differ in spacing between P1 and P3 pulses (see Figure 4). Each mode has a certain purpose and subsequently elicits a different response from the aircraft transponder. Generally, interrogation signals are separated into three main modes:
Mode A: This mode is used to request the identify number of an aircraft. The P1 and P3 time interval of the Mode A interrogation signal is 8 μs, and the transponder sends a 12-pulse reply signal.
Mode C: The purpose of this mode is to gather altitude information in 100 ft increments. The P1 and P3 time interval of the Mode C interrogation signal is 21 μs, and the transponder responds with an 11-pulse reply (pulse D1 is omitted).
Mode S: Used for various purposes, the time between P1 and P3 of the Mode S interrogation signal is 3.5 μs. Diverging in characteristics from the previous two modes, Mode S is comprised of a preamble with P1 and P2 pulses and a phase-modulated 56-bit or 112-bit data block. The transponder’s reply signal consists of a four-pulse preamble and a 56-bit or 112-bit data block.
IFF/SSR RF MEASUREMENTS
Beyond the fundamental radar measurements discussed above, engineers and technicians will want to assess multiple pulses within a waveform, such as those within an IFF interrogation response (see Figure 5a), to ensure proper pulse spacing and amplitude levels. State-of-the-art RF power measurement tools provide simultaneous multi-pulse analysis. For example, Figure 5b lists important pulse parameters in one convenient display, including the start time, pulse duration, pulse (top) average power, and time between pulses.
 |
 |
| (a) | (b) |
Figure 5: IFF interrogation response (a) and various pulse-related parameters (b).
Because of the high RF power needed in radar systems, the power amplifiers (PAs) are placed under a great deal of strain. Coupled with the importance of reliable operation for safety concerns, long-term monitoring of the radar/amplifier is critical. For instance, the effects of heating in PAs can lead to droop in output power or complete dropouts in some cases.
Most power measurement instruments can only capture information for short periods of time (< 1 s) before they have to pause for data processing and transfer. Conventional power measurement equipment using standard processing techniques typically gather enough samples along a waveform until a trace can be recreated on a display. Acquisition is then halted to convert the collected samples into a trace, and the new measurement cycle cannot resume until the sequential processing steps are complete. Important data and events from the device being tested are lost during the processing cycle. In addition, the samples captured along the waveform are stored in a buffer that is limited by the memory of the power meter or sensor. Once the buffer reaches full capacity, the data is transferred to the user’s PC. Buffer size limitations result in fairly short observation windows, outside of which waveform phenomena may be missed.
Industry-leading instrumentation can process RF measurements in real time to ensure there are no gaps in data acquisition and can provide measurements over prolonged time periods. Sensors that feature real-time, gap-free data capture, such as the Boonton 4500C Peak Power analyzer and RTP5000 series of real-time peak USB power sensors, can achieve this leading performance by replacing conventional signal processing techniques with an innovative processing methodology. Instead of waiting for the completion of serial processing steps, advanced approaches capture and process waveform samples in parallel to the acquisition. As a result, acquisition is never halted and virtually no information is lost. Used in combination with complementary software utilities, engineers can capture RF power measurements at unmatched speeds for extended measurement windows. For example, real-time capture of only the most important measurement values (such as minimum, average and maximum powers, as well as start time and packet duration) can lead to less data accumulation in the buffer and reduce data transfer to the PC. State-of-the-art technology enables this ability to collect and process samples from virtually an unlimited number of consecutive packets without missing crucial waveform anomalies.
NOISE RADAR TECHNOLOGY
In air traffic control, it is absolutely vital that radar signals are detected and processed. However, with growing threats arising around the world, sometimes covert, stealth-focused operations necessitate the use of undetectable radar signals. Noise radar technology transmits random waveforms typically created from high-frequency noise generation devices. Noise radar technology satisfies specific requirements in the military sector to decrease the probability of radar intercept as well as limits mutual radar interference while operating in dense, crowded environments. Successful implementation of noise requires advanced designs of essential components, such as amplifiers.
NOISE RADAR TECHNOLOGY RF MEASUREMENTS
Noise waveforms have high peak-to-average (RF power) ratios, also known as crest factors. By monitoring the crest factor of the signals presented and amplified by radar amplifiers, an engineer or technician can ensure the amplifier is not going into compression, which can be identified when input and output crest factor measurements diverge. A compressed amplifier will produce frequency harmonics, which may make detection easier in noise radar technology applications, as well as distort the signal making it more difficult for a receiving radar to obtain correlation. Peak RF power sensors can measure signal crest factors, however, test instrumentation needs sufficient video bandwidth (VBW) to adequately track the noise signal (similar to the rise time requirements mentioned previously). State-of-the-art RF power measurement equipment provides up to 195 MHz of VBW – the widest VBW available to accurately characterize today’s wireless signals with demanding channel utilization capabilities.
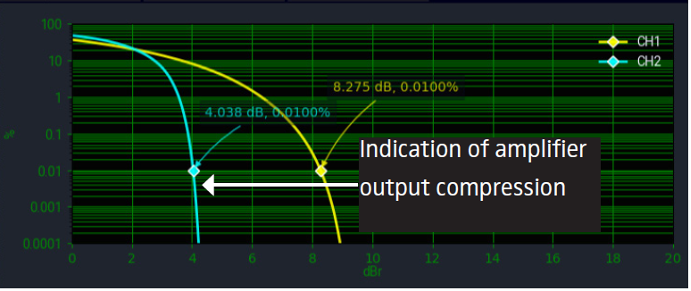
A crest factor measurement provides only a single data point, the maximum crest factor. Therefore, looking at a complementary cumulative distribution function (CCDF) can provide additional information. A CCDF curve shows a signal’s rate of occurrence above the average power level by a certain amount of dB, in other words, the rate of occurrence of a specific crest factor. State-of-the-art RF power measurement equipment facilitates characterization of complex, modulated signals by providing statistical analysis tools, including the CCDF.
Figure 6 shows an input to an amplifier (CH1) and the output of an amplifier (CH2) in two CCDF curves. The output signal’s reduction in crest factor indicates the output of the amplifier is in significant compression.
ELECTRONIC COUNTERMEASURE RADAR
When radar signals cannot be hidden through techniques such as those associated with noise radar, electronic countermeasure (ECM) technologies are used to deceive radar detection, one of which uses variable PRFs. Many radar systems are constrained to only recognize signals that are compliant with its protocol. Therefore, varying the PRF can confuse standard radar receivers. For example, changing the PRF can obscure the distance or speed of an object.
ECM RF MEASUREMENTS
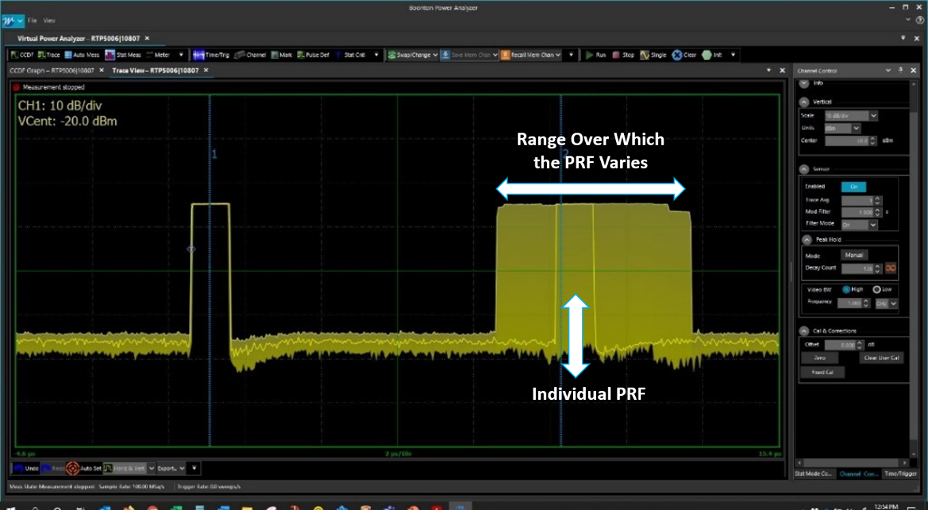
To determine the effectiveness of ECM, RF power measurement instrumentation needs to be able to determine the range of variation in PRFs, and state-of-the-art equipment can measure and easily display this change. By utilizing PRF range measurement tools, engineers can verify effectivity. Figure 7 illustrates an interface with individual PRF as well as the range over which it varies.
ENABLING COMPLEX, MODERN RADAR TECHNOLOGIES
Advanced radar systems, including DME/DVOR, IFF/SSR, noise radar technology and ECM, rely upon leading test equipment that deliver accurate RF power measurements for optimal performance. Cutting-edge instrumentation, like the power measurement products offered by Boonton, provide fast rise times (3 ns), automated pulse measurements, superior time resolution (100 ps), real-time processing, extended measurement windows, wide VBW (195 MHz), statistical analysis, high-frequency noise generation and varying PRF measurements, among other key testing tools and features. From military to civilian applications, engineers and technicians can continue pushing the forefront of radar technology by choosing the state-of-the-art in RF power measurement test equipment.