
On June 1, 2015, China faced one of the deadliest maritime disasters in its history when a ship was traveling with 454 people on-board in the Yangtze River encountered a massive thunderstorm that capsized the ship and caused its complete destruction. About 442 people died and only 12 were rescued. After facing gusts over 118 km/h, the ship sank in approximately 15 meters of water. It took about 12 hours to provide full strength rescue support to the ship and 30 days before they could identify the correct number of people rescued. One of the major reasons for the disaster seemed to be the delay in the notification of the thunderstorm to the technical staff of the ship. These kind of incidents reminds us of the importance of underwater (seawater) research; including the design and analysis of short range, high bandwidth (MHz), higher data rates (Mbps) and high propagation velocity approximately near to free space (≈3*107 m/Sec with minimum latency) underwater electromagnetic (EM) communication systems.
Electromagnetics and the Ocean:
EM propagation as it applies to the sea has many challenges. Some areas that can be examined include:
- Interaction of RF with sea surface and near surface depicted in Figure 1.
- Emission of radio and microwave energy from the sea surface.
- Induced voltages caused by seawater moving in a magnetic field
Interest in such problems stem in part from the capability of remotely measuring number of physical properties of ocean using EM radiation. Therefore learning about certain limited but nevertheless important oceanic processes; operational needs for communication and surveillance in the marine environment; and propagation of infrared and optical wavelength energy in the sea. Physical properties or processes that can be observed via EM radiation (albeit with varying accuracies and coverage’s) include the following: ocean surface wind stress (i.e., magnitude and direction), surface wave spectra, internal wave surface signatures, surface geotropic current values, sea surface topography, sea surface temperature, and sea ice cover. In addition, hydrodynamic transport rates in limited passages can be inferred from the EM potentials induced in electrodes and cables mounted on the sea floor.

Figure 1. Multipath propagation of RF signal in Shallow Water
Underwater Electromagnetic (EM) Communication:
Underwater EM communication was investigated with intensity in last century up until 1970s. Underwater (seawater) conductivity σ (S/m), permittivity ϵ (F/m) along with restricted range by attenuation α (Np/m) were not helpful for significant breakthrough. Even though acoustic waves can travel long distances in seawater with little α at speed of 1500m/s; communicating through EM waves with approximately (3*107m/sec) in seawater at higher data rate means (high bandwidth) for short range has many important applications like pinpointing submerged targets during naval operations, communication across sea/air boundary and recording of seismic waves, etc. The oldest known application of EM in a seawater environment is magnetic compass used for navigation. Maxwell’s equations can predict propagation of EM waves travelling in conducting medium (seawater) described in terms of electric field strength Ex (V/m) and magnetic field strength Hy (C/m) respectively as:
Propagation constant (γ) measures the change in amplitude α (Np/m) and phase β (rad/m) of EM wave as it propagates through seawater; expressed in terms of ϵ (F/m), permeability μ (H/m) and σ (S/m). The term (ϵμ) arises from displacement current and (σμ/ω) from conduction current. It is convenient to consider here; conduction band if (σ/ω > ϵ) and dielectric band if (σ/ω < ϵ) depicted in Figure 2.
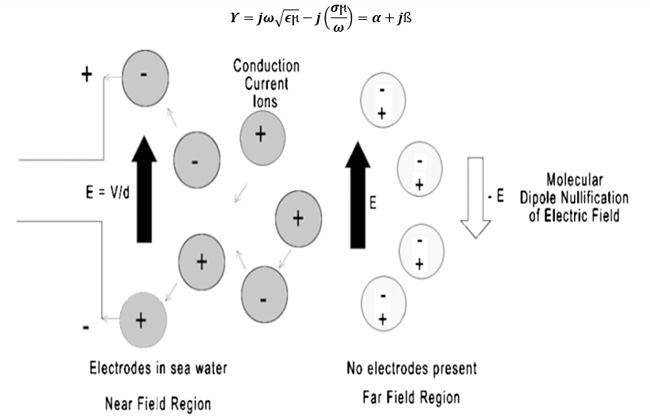
Figure 2. EM Waves in Seawater
Seawater has dipole lossy dielectric structure with σ of approximately 4 (S/m). In near-field, because of proximity of electrodes conduction current (σμ/ω) exists, while in far-field influence of electrodes is minimal and under these conditions dielectric molecular dipole displacement (nullification) current (ϵ μ) exists. Conduction is continual loss process while nullification signal and much smaller loss process in response to change of E (V/m) is illustrated in Figure 3.
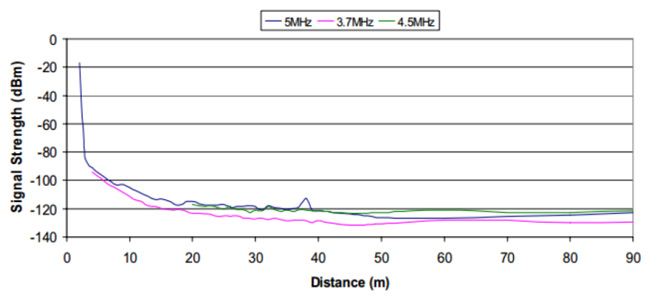
Figure 3. Signal Strength as a function of Distance
Wireless Underwater Sensor Networks Overview:
Wireless Underwater Sensor Networks (WUSN) are envisioned to operate in quite different environments, including soil medium, water medium, oil reservoirs, and underground mines and tunnels. System architecture of general WUSNs consists of large number of wireless sensor nodes buried in underwater (seawater) as depicted in Figure 4.
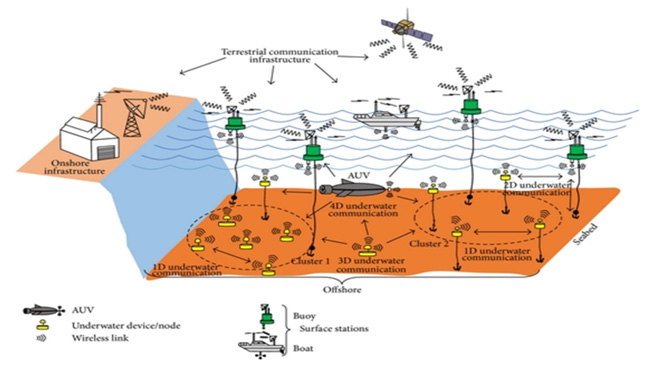
Figure 4. Generic WUSN Architecture
Hostile underwater environments prevent direct use of most, if not all, existing wireless communication and networking solutions due to the extremely high path loss PL (dB), short communication range R (meters), and higher dynamics of EM waves while penetrating soil, sand, rock, water, and crude oil mediums. In generic WUSN architecture, there may still be some devices, such as sink nodes, deployed above water. Hence, communication between underwater sensors and above water sinks should also be considered. Most WUSNs use acoustic waves as transmission type, but the chance of getting much more out of acoustic modems is quite remote. Optical links are impractical for many underwater applications. Given modern operational requirements and digital communications technology, the time is now appropriate for re-evaluating the role of EM signals in underwater environments. Even though, in general, acoustic waves perform better and have been used for underwater communications, there are some applications like border security which display features different than those assumed for underwater communications. In cases of shallow or average depth small rivers, small lakes, water ponds and fish farms, acoustic waves do not yield the expected results in terms of price and performance.
An example is a terrestrial country border which will pass through terrains of land and rock, but also areas of where water has collected naturally (lakes, ponds, etc.) or on purpose (dams, fish farms, etc.). As EM wave propagation would be the best choice, implementing a different propagation method for limited water reservoirs will be inadequate. The optimal solution for this specific scenario will be to apply the same propagation method to the whole network. As a result the necessity arises to examine propagation characteristics of EM waves in water mediums as well and suggest a viable engineering solution that will take into consideration all the requirements. WUSN can be defined as a group of sensor nodes whose means of data transmission and reception is completely underwater. This includes situations in which a node is underwater, yet in an open space such as a cave or mine, as well as when a node is completely embedded within dense soil or rock. WUSNs have a number of promising applications including:
(1) Environmental monitoring, for example WUSNs can be used to monitor and report the presence of toxic substances for soils near rivers;
(2) Infrastructure monitoring, for example WUSN can be used for monitoring underwater water pipes;
(3) Location determination, for example WUSNs can be used in the location of miners in underwater mines in case of an accident; border patrol and security monitoring are other areas where WUSNs can be applied.
The unique nature of channel in WUSNs posses the biggest challenge as far as communication amongst underwater wireless sensors is concerned. Wireless communication with EM waves through a dense medium such as seawater, soil or rock experiences high levels of α (dB/m) due to the absorption of the signal. Overall, underwater wireless channels for EM waves can be characterized by signal loss due to the multi-path effects caused by inhomogeneous nature of soil such as reflection, refraction, phase shifting, noise caused by electrical ground currents, and extended black-out periods after a rainfall due to wet soil. The ability to predict signal strength provided by sensor nodes in WUSNs is not only useful to researchers but also a convenient capability in practice. For instance, propagation models can be used in conception and design of communication interfaces in order to optimize their performance. They can also be used during the actual field deployment of communication systems in order to determine the coverage. Ultimate goal of propagation modeling is to determine the probability of satisfied performance of a wireless system in seawater that depends on radio wave propagation.
Using EM waves in RF, conventional radio does not work well in an underwater environment due to the conducting nature of the medium, especially in the case of seawater. However, if EM could work underwater, even in a short distance, its much faster propagation speed is definitely a great advantage for faster and efficient communication. Free-space optical (FSO) waves used as wireless communication carriers are generally limited to very short distances because the severe water absorption at the optical frequency band and strong backscatter from suspending particles. Even the clearest water has 1000 times α (dB/m) of clear air, and turbid water has more than 100 times α (dB/m) of the densest fog. Nevertheless, underwater FSO, especially in the blue-green wavelengths, offers a practical choice for high bandwidth communication (10–150 Mbps), over moderate ranges (10–100 meters). This communication range is much needed in harbor inspection, oil-rig maintenance, and linking submarines to land, to just name a few of the demands on this front. Depending on the applications, we can roughly classify the targeted dense sensor networks into two categories.
(1) UWSNs for long-term non-time critical aquatic monitoring applications (such as oceanographic data collection, pollution monitoring/detection, and offshore oil/gas field monitoring).
(2) UWSNs for short term time-critical aquatic exploration applications (such as submarine detection, loss treasure discovery, and hurricane disaster recovery).
The former category of UWSNs can be either mobile or static depending on the deployment of sensor nodes (buoyancy-controlled or fixed at sea floor), while the latter category of UWSNs is usually mobile since it is natural to imagine that the cost of deploying/recovering fixed sensor nodes is typically forbidden for short term time-critical applications. To summarize, we will focus on three types of UWSNs:
(1) Mobile UWSNs for long-term non-time critical applications (M-LT-UWSNs);
(2) Static UWSNs for long term non-time critical applications (S-LT-UWSNs);
(3) Mobile UWSNs for short-term time-critical applications (M-ST-UWSNs).
Channel Characterization of RF Communication at MHz Frequencies:
Seawater EM communication presents advantages over acoustic and optical in shallow water and deep oceans. Theoretical analysis of EM wave propagation in seawater helps us to estimate maximum distance covered in seawater at multiple depth points up to 5500 m. Mathematics of EM propagation in seawater (conducting medium) shows dependence on f (Hz), ϵ (F/m) and σ (S/m) of transmission medium. Reference 1 presents the channel characteristics of EM (TEM) wave’s propagation at (1-20) MHz frequency through seawater based on real time data of seawater T (Co) and S (ppt) for averaged decades from (1955-2012) up to 5500 m. Estimated; seawater σ (S/m),ϵr (F/m) (using Stogryn’s Model),α (Np/m) (using Helmholtz Model),Z (Ohms), fT (Hz),vp (m/Sec),τ (Sec) and Pr (dBm) (using Maxwell’s Equations and Friis Law) parameters against multiple depths of seawater and frequencies shows that we cannot assume constant σ (S/m) (4),ϵr (F/m) (81), fT (Hz) (888MHz),vp (m/Sec) (3.33*107) and τ (Sec) (8.2*10−12) for seawater. Estimated Pr (dBm) helped us to analyze that for lower transmission frequencies (means higher ϵr′′) and for lower σ (S/m); Pr (dBm) decays linearly. While for higher frequencies (means lower ϵr′′) and for higher σ (S/m); Pr (dBm) faces sudden exponential decay. That negates sudden exponential delay (in general) of Pr (dBm) in seawater as depicted in Figure 3; it was only possible by assuming constant seawater ϵr (F/m) and σ (S/m).
To characterize seawater communication channels at MHz frequency, real time averaged data (averaged decades) is used for T (Co) and S (ppt) from (1955-2012) at multiple depths of oceans (Indian, Pacific, Atlantic, Southern and Arctic) up to 5500 m (https://www.nodc.noaa.gov/). The average depth of world oceans is in excess of 3500 m. Average data for these parameters taken vertically along depth of oceans at each point of latitude (angle which ranges from 0o at Equator to 90o (North or South) at the poles) and longitude (angular distance ranges from 0o to 180o in degrees, minutes and seconds; a point east or west of Prime (Greenwich) Meridian). Latitude used together with longitude to specify precise location on surface of Earth.(http://www.worldatlas.com/).
To encounter problems related to seawater communication (like EMI) using EM waves; dipole Tx effective to achieve directional transmission of EM wave; rather than using Isotropic Omni-directional) Tx. Tx encapsulated with insulator that contains fresh water (deionized) with σ =0.000001 S/m helped to avoid direct contact of conducting Tx with seawater and also helps to avoid sudden decay of wave. Length of insulation box will be approximately equals to Rayleigh (m).Friis law will be effective after Rayleigh (m) (far-field); so no near-field distance. Deionized water encapsulated into an insulator will help EM wave’s remains constant approximately in that box. Device for propagation of EM waves through seawater proposed depicted in Figure 5.
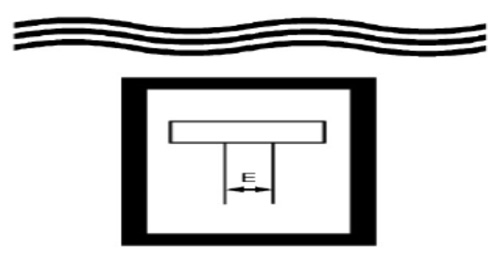
Figure 5. Device for propagation of EM waves in seawater
α (dB/m) helps to estimate absorption loss Lα (dB); based on Helmholtz Model for real time data of (ϵ, σ); shows α (dB/m) on average lies between (0.1-12) dB/m up to 5500 m . α (dB/m) increases with frequency, while decreases (approximately linear) w.r.t depth of seawater as shown in Figure 6. Initially as we can see in Figure 6; α (dB/m) lies in range (6-12) dB/m and as depth of seawater increases further α (dB/m) goes in low range (0-6) dB/m. Table 1 depicts how σ (S/m) varies with depth based on real data.
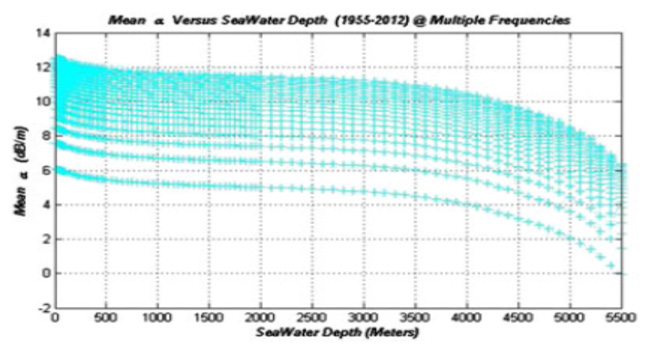
Figure 6. α for EM signals versus seawater depth

Table 1. Mean σ(S/m) of seawater at multiple depths
While reading literature we discovered that vp (m/Sec) lies near 3*107 (m/Sec) for seawater. The estimation of vp (m/Sec) using real time data for (β) shows vp (m/Sec) on average lies between 0.5 *107 − 3 * 107 (m/Sec) up to 5500 m as shown in Figure 7. As we can see in Figure 7, as the depth of seawater vp (m/Sec) lies in range 0.5 *107 − 3 * 107 (m/Sec) and depth of seawater increases, vp (m/Sec) start decreasing; in range approximately near to 0.5 *107 − 1 * 107 (m/Sec). Against frequency range 1-20 MHz, vp (m/Sec) initially reaches to maximum value 3 *107 (m/Sec) and as frequency increases vp (m/Sec) start decreasing reaches minimum value 0.5 * 107 (m/Sec) as can be seen in Figure 7. Table 2 depicts multiple estimated parameters across frequency spectrum 1-20 MHz.
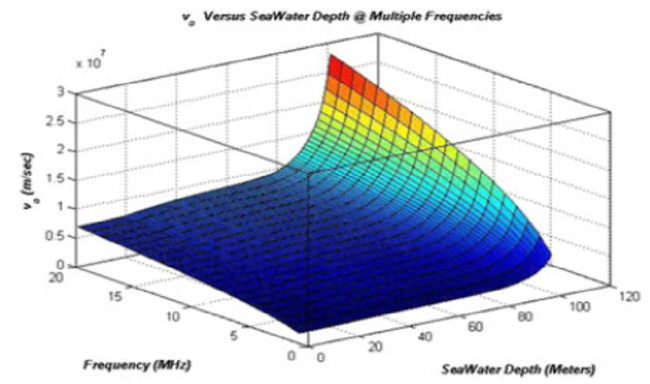
Figure 7. Vp versus seawater depth at multiple frequencies
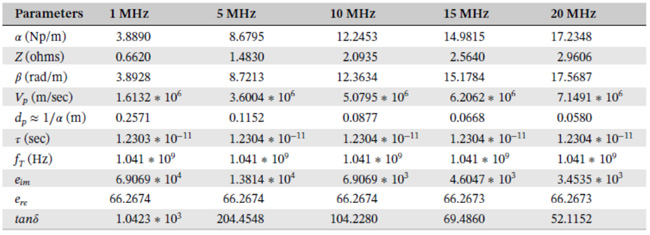
Table 2. Estimated parameters for 100m depth at multiple frequencies
Estimation of transmission range R(meters) for EM waves in seawater and Pr (dBm) using real time data (PG,Gt ,Gr ,Lo,LEMuw) averaged between (1955-2012) at multiple depths shows; R (meters) on average lies between 45−300 (meters) and Pr (dBm) (0-6 * 10−3) dBm as shown in Figure 8.From estimated Pr (dBm) given below; we can analyze that for lower transmission frequencies (means higher ϵr′′)and for lower σ (S/m); Pr (dBm) decays linearly. While for higher frequencies (means lower ϵr′′) and for higher σ (S/m); Pr (dBm) faces sudden exponential decay. Figure 8 also negates sudden exponential delay as can be seen in Figure 3; for Pr (dBm) in seawater; it was only possible by assuming constant seawater ϵr and σ.
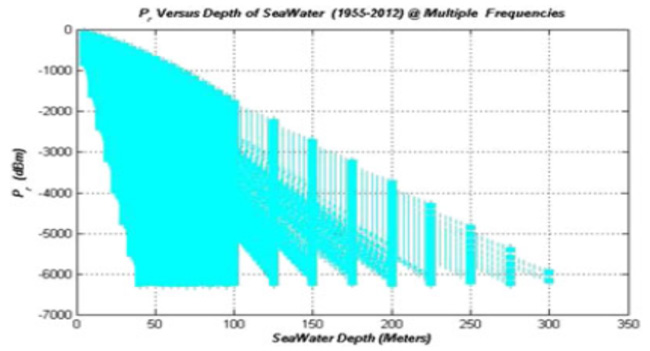
Figure 8. Pr versus seawater depth
NLLS Range Estimation Based on Attenuation:
Estimated absorption loss (Lα) and spreading loss (Lo) of electromagnetic (EM) waves propagation considering multiple seawater depths along with computed loss due to polarization of EM fields between transmitter Tx and receiver Rx antennas, polarization factor (Lφ); helps us to predict achievable range (Rest) by fitting Non-Linear Least Square (NLLS) approximation, from reference 2, combined with Lambert Transformation for non-linear exponential decaying loss. Moreover, predicted Rest (m) helps to minimize mean error (mean (e (t))) by adapting using NLLS approach to actual range R (m) between transceivers. Least Square (LS) approach minimizes squared difference between x (t) (in our case Rest (meters)) and y (t) (R (meters)) as depicted in Figure 9. It describes overall process of NLLS approach considering input, output and also model inaccuracies and system noise. In this case, x(t) represents summation of perturbed version (Model Inaccuracies) like (Lα, Lo, Lφ) and noise( Pn) which is further based on θ accounts for input frequency, PT ,GT and modulation schemes (BPSK,QPSK or FSK) in our case. Input y (t) (in our case R) is actual distance between Tx and Rx; while x (t) is generated by model based on θ described as perturbation on input sequence of information y (t). Here observational interval assumed between n = 0, 1... N−1 and dependence of J (Jacobean matrix) is on θ via y (t). No probabilistic assumptions are made about x (t) so that method is equally valid for Gaussian and non-Gaussian channel. Performance depends on noise corruption No or Pn and modeling errors. Moreover, fitting RSS with non linear LSE helps to estimate Rest with the help of Lambert-W transformation.
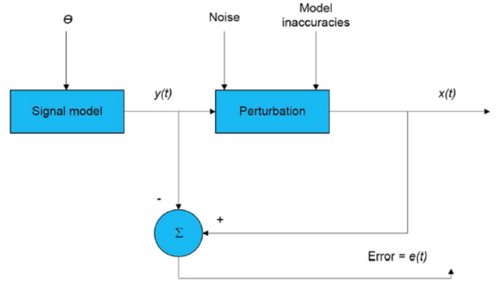
Figure 9. Least Square Estimation approach
As we can see in Figure 10, Rest approximated at different frequencies versus number of occurrences shows that it varies from (0-200) meters in a non-linear way. For certain frequencies, Rest strict to 50 meters but for low frequencies goes up to 200 meters based on parameters like ϵr and σ which vary at seawater depth and multiple frequencies. Error e (t) between actual and predicted location of Tx based on non-linear LSE varies from (0-400) meters as shown in Figure 11. However, at low frequencies and lower seawater depth, the error remains minimum that helps to localize underwater nodes and vehicles based on EM waves. Error between Rest and R can be minimized by applying principle shown in Fig: 9 and by adjusting input parameter θ. Table 3 depicts multiple estimated parameters across several depths up to 5500 m.
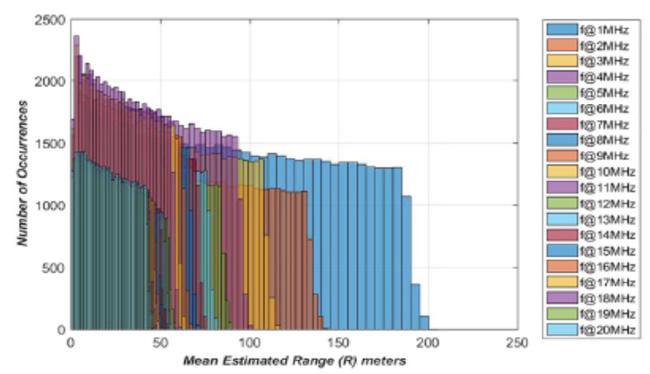
Figure 10. Mean (R) estimated versus number of occurrences
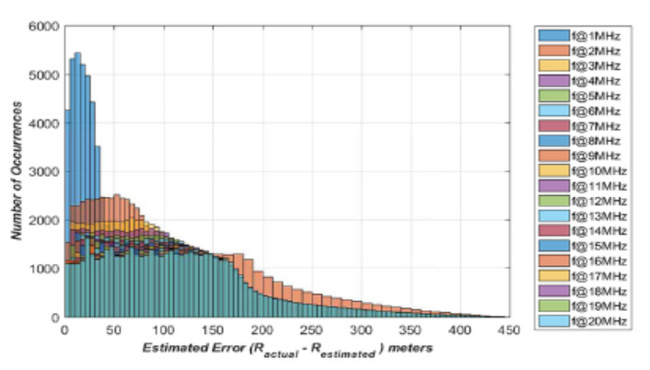
Figure 11. Mean e(t) estimated versus number of occurrences
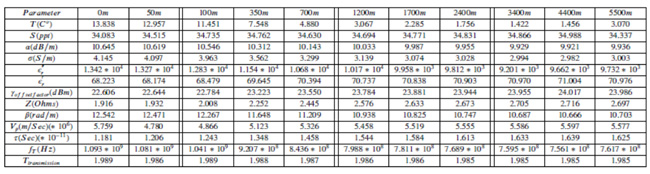
Table 3. Estimated parameters at multiple seawater depths
Computation of probability of error (Pe) for different modulation schemes BPSK/QPSK (coherent) and FSK (coherent, non-coherent) based on assumption of (B (Hz) = R (bps)) for BPSK/QPSK (coherent) shows Pe increases from 0.5 to 0.055 up to 100 meter depth. After 100-200 m depth on average remains constant. For FSK (coherent), Pe increases from 0.5 to 0.152 up to 100 meter depth. For FSK (non-coherent), Pe increases from 0.5 to 0.3 up to 100 meter depth depicted in Figure 12. In future we can look at this problem in context of e-navigation; bringing existing and new technologies together to improve safety of navigation, commercial efficiency and security. Challenge for industry working through international maritime organization (IMO) will be to produce unified strategy for integration and to develop systems to meet the requirements through S-mode. Concept of S-mode is default setting to bring all inputs like radar, charts, positioning for e-navigation to bring on one platform. This all needs to be achieved through acceptable cost and benefit’s-navigation will be used for monitoring all kinds of activities in oceans.
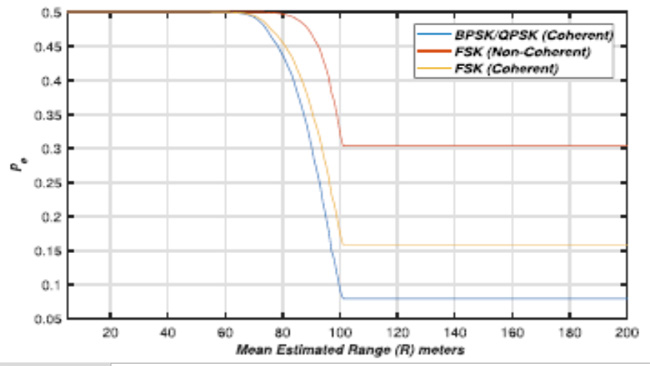
Figure 12: Mean estimated R versus Pe
Conclusions on Underwater Wireless Communication using EM Waves:
1. EM communication suitable for shallow and deep waters with higher data rate and limited range applications.
2. Target can be efficiently located using EM waves in seawater rather than acoustic or optical way of target tracking.
3. EM waves outperform in dirty water and shallow water than acoustic or optical; considered as suitable technology for all depths.
4. EM waves can cross sea/air boundary with minimum transition loss.
5. EM transmission range can be extended by choosing appropriate insulation medium and length if insulation box depicted in Figure 5.
6. Choosing above mentioned proposed method of EM transmission helps us in controlling sudden decay in received power.
7. Real time data of seawater parameters effecting communication channel helps us to analyze EM communication effectively.
8. Based on estimated channel parameters we can adjust transmitter power level accurately to achieve threshold received power.
9. Since the model that represent channel behavior in seawater is non-linear and exponentially decaying; so by applying Lambert-W transformation we can convert it into approximately linear problem.
10. By applying NLLS approach we can than estimate correct range that can help us in adjusting input parameters to minimize error and Pe.
References
1. Tahir M, Yan P, Shuo L. Channel characterization of EM waves propagation at MHz frequency through seawater. International Journal of Communication Systems. 2018 Feb; 31(3):e3462.
2. Tahir, M., Yan, P. and Jafri, M.R., 2019. Nonlinear least square approach for range estimation based on attenuation of EM waves in seawater using world ocean data from 1955 to 2012. International Journal of Communication Systems, 32(16), p.e4117.
Author:Dr.M.Tahir
Ph.D (Information and Signal Processing)
engr.tahir1987@gmail.com