
Editor’s Note: The Internet of Things (IoT) has become a hot topic this year with the release of some major wireless wearable devices and increased use of wireless appliances and industrial controls. The following two articles cover the low power design of wearable devices by Silicon Labs and industrial mesh networking by Linear Technology.
Winning Design Strategies for Wireless Wearables
Mendy Ouzillou, Silicon Labs, Austin, Texas
When Chester Gould drew that iconic watch on Dick Tracy’s wrist, little did he realize that science fiction would become a reality some 70 years later. As a comic strip artist, Gould envisioned a futuristic device without worrying too much about the details. Today, these very real wrist-top devices and other wireless wearable devices (WWD) present engineers with a slew of challenging design details that they must address. Engineers must seamlessly integrate complex sensing, processing, display and wireless technologies into affordable, compelling, compact designs that can run for months or even years on a single, small and cost-effective battery. Here we examine the unique requirements of wearable devices and the technology and component choices that enable a combination of sophisticated functionality, long battery life and seamless wireless connectivity – all within extremely small form factors.
The three key factors an engineer must consider in a wearable design are power consumption (energy friendliness) across all modes of operation, proper RF design from the matching circuits to the antenna(s) and the integration level of the devices used in the design. We will explore the integration challenge in more detail as it is difficult to discuss this factor in isolation without taking into account energy efficiency and RF design.
Most wireless wearable devices share common components including a battery, an antenna, a microcontroller (MCU), a radio and a sensor. What is immediately obvious from this list is that the battery will in large part drive realizable functionality and operating life of the WWD. As the majority of WWDs are not meant to stream data continuously due to the severe drain on the battery, we can assume that communications are bursty and infrequent. Furthermore, since MCUs with integrated radios, often called wireless MCUs (WMCU), are readily available, save board space and reduce power consumption, we can also assume the use of WMCUs in the wearable design.
Selecting the right WMCU for the application can be a complex decision since the desire for high functionality in a feature-rich device must be constrained by the battery operating life. If we look at just the peak power consumption of the WMCU and extrapolate battery life from that single metric, the results would be rather disappointing. However, WWDs typically operate in many different energy modes (EM) and rarely enter a high power state. By taking into account the amount of time spent in each of these energy modes, we can determine a device’s realistic operating life.

Figure 1 Very fast wake-up time, low active current and very low sleep current are keys to minimizing energy consumption.
For example, at Silicon Labs we have defined five energy modes for the ARM-based EFM32 MCUs: EM0 (active/run), EM1 (sleep), EM2 (deep sleep), EM3 (stop) and EM4 (shutoff). These five modes enable the designer to properly determine and optimize the system’s overall power consumption. However, identifying these modes and attaching specs to them in a datasheet does not guarantee low power consumption across all modes or more succinctly, energy friendliness. What ensures energy friendliness, and by extension a positive end-customer experience, is the way the WMCU is architected to operate in these different modes. In fact, depending on the time between bursts, active mode EM0 might represent a small percentage of the overall power consumption, and the time spent in deep-sleep mode, EM2 may represent the largest percentage of the battery drain.
When selecting the best WMCU for their application, engineers should look for the following features of an ultra-low-power WMCU:
- Lowest active power consumption (EM0)
- Lowest standby currents (EM1 and EM2)
- Choice of microprocessor cores including 8 and 32-bit ARM Cortex (M0+ to M4)
- Range of radio configurations to choose from, including TX-only, RX-only, TX+RX and performance levels.
There are additional MCU features, both related to architecture and integration, which are equally important:
- Very fast wake-up times
- Autonomous peripheral operation
- Autonomous inter-peripheral operation (Peripheral Reflex System)
- Low energy sensor interface (LESENSE)
- Rich set of energy-efficient peripherals and interfaces
- RF integration
Lowest Standby Currents and Fast Wake-up Times
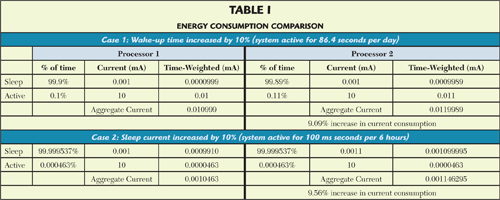
When designing a wireless wearable device that is as energy friendly as possible, one must ferret out every possible optimization of power consumption. When a device wakes up, it must do so as quickly as possible, collect and process data as quickly as possible and go back to sleep as quickly as possible (see Figure 1). Ensuring a fast transition from a sleep mode to active mode is a critical consideration. If one processor spends even 10 percent more time in active mode than another processor, the impact on battery life can be dramatic. For example, assume that processor 1 spends 99.9 percent of its time in deep sleep (1 µA) and 0.1 percent of its time in active mode (10 mA), while processor 2 spends 99.89 percent of its time in deep sleep and 0.11 percent of its time in active mode, then the overall current consumption of the second processor is increased by 9.1 percent. Interestingly, if processors 1 and 2 are now active for only 100 ms and 110 ms respectively out of every 6 hours, the results will highlight the importance of very low deep sleep current. In this case, the second processor will only consume 0.44 percent more current than the first. However, make the active mode time the same and increase the deep sleep current from 1 to 1.1 µA, then the current consumption goes up by 9.6 percent (see Table 1).
Autonomous Peripheral Operation
Wearables, depending on their function, may need to interact with or monitor on-chip peripherals frequently or even continuously. In either case, requiring the CPU to be active during those times represents a significant drain on the battery. Ensuring that the on-chip peripherals can operate autonomously without waking the CPU enables the system to operate in low energy modes while still performing very advanced tasks (see Figure 2). These peripherals can include serial interfaces (e.g., low-energy UART, crystal-less USB), I/O ports (e.g., external interrupts, GPIO), timers and triggers (e.g., low-energy timer, low-energy sensor interface), analog modules (e.g., ADC, LCD controller) and security (e.g., AES accelerator).
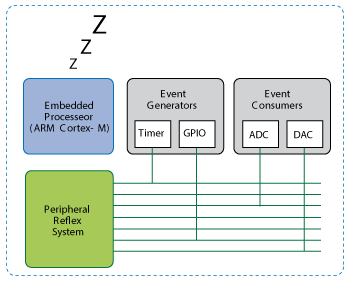
Figure 2 Autonomous peripheral operation, autonomous inter-peripheral operation and configurable/energy efficient operation are keys to wearable design success.
Autonomous Inter-Peripheral Operation
There are also circumstances where peripherals may need to communicate with each other. In these cases, one peripheral can generate an event or events that can be instantaneously acted upon by another on-chip peripheral. For example, a timer may be set to create an event that then triggers an ADC to begin sampling. Enabling autonomous operation between these peripherals without waking the CPU ensures the lowest system power consumption (see Figure 2). As an example, this capability is a key aspect of Silicon Labs’ EFM32 MCU architecture and is known as the Peripheral Reflex System.
Low Energy Sensor Interface
Eventually, the CPU will need to be awakened to perform a specific task. Most MCUs will be set to awaken on a set schedule and monitor its interfaces, and if no action is required, it will go back to sleep. These periodic wake cycles unfortunately drain unnecessary power from the battery. The LESENSE architecture used in EFM32 MCUs allows autonomous monitoring of analog sensors (resistive, capacitive and inductive) and only awakens the CPU on a relevant event or even conditionally, like every other event. For example, LESENSE can be set up to autonomously monitor a temperature sensor and take the action via the Peripheral Reflex System to wake up the CPU only if the programmed threshold of 99°F is exceeded. Using LESENSE minimizes the amount of time the CPU is enabled and consuming the greatest amount of power.
Rich Set of Energy-Efficient Peripherals
Developing a wearable device that consumes as little power as possible in all modes of operation requires an MCU architecture in which every aspect of operation is scrutinized. Although autonomous operation of the peripherals has been discussed, it is helpful to take a closer look at the low power requirements of the peripherals themselves. Autonomous operation achieves very little if the peripherals are power hungry or if clocks are enabled unnecessarily.
As a peripheral itself, the clock management unit plays a significant role in determining the MCU’s or WMCU’s overall power consumption. The clock management unit enables individual control of the various clocks and oscillators and optimizes clock selection based on the energy mode of operation and the peripherals enabled. Using low-power oscillators combined with a flexible clock control scheme, it is therefore possible to minimize the energy consumption in any given application. Aspects of an energy-efficient clock management unit include current starved oscillators, low start-up times, dynamic system clock division, clock pre-scalers for 32 kHz peripheral modules and clock gating.
Availability of a low-energy autonomous universal asynchronous receiver/transmitter (UART) is also important to achieve low system power consumption especially during deep sleep (EM2) where most other peripherals and the CPU are turned off. This UART should include the necessary hardware support to make asynchronous serial communication possible with minimal software intervention. By using a 32.768 kHz clock source, the low-energy UART can support up to 9600 baud, and when a complete UART frame is received, the CPU can be quickly awakened.
A low-energy timer can be used for timing and output generation when most of the device is powered down, thus allowing simple tasks to be performed while the power consumption of the system is kept at an absolute minimum. When properly configured, such a timer can provide glitch-free waveforms at frequencies up to 16 kHz (half the frequency of a 32 kHz oscillator).
Analog resources such as an ADC, DAC, LCD controller, analog comparators and other peripherals commonly found in MCUs and WMCUs should be carefully analyzed for their power consumption as well as their flexibility. For example, a 12-bit 1 Msps ADC may consume 350 µA at full rate, but not all applications may require operation at that level. The application may only require 6-bits and 1 ksps, in which case the ADC would consume only 0.5 µA – a significant reduction. An LCD controller should be able to run custom animations without any CPU intervention and only wake the CPU when data needs to be updated.
Encryption can be very resource intensive and a noticeable drain on the battery. The lowest cost 8-bit MCUs will require the security algorithms to be performed as run-time code while 32-bit MCUs will most likely include an AES accelerator. When a hardware AES accelerator is available, it should be capable of running autonomously without involving the CPU and include DMA support for autonomous cipher modes to minimize the battery drain.
RF Integration
The previous discussion centered largely on the MCU architecture. However, there are additional features related to the radio transceiver. Wireless wearable devices may never need to receive information based on the application requirement, but most will need to transmit data at some point. Poor power amplifier efficiency in battery-operated devices can dramatically increase the system power consumption and require an application to increase the size and cost of a battery to meet the system operating life requirement. For example, long-range devices may require RF output power levels of +13, +16 or even +20 dBm. Though integration of +10 dBm RF power amplifiers (PA) in WMCUs is widely available, if the application requires any more output power, an external transistor or amplifier will be needed. These external amplifiers are not economically viable because they are very difficult to make efficient and cost-effective. Therefore, in long-range applications and/or applications that require frequent communication, efficiency and battery life are typically sacrificed to achieve aggressive cost targets. One way to address this issue is to ensure that the WMCU integrates the appropriately sized power amplifier, even up to +20 dBm. By integrating the PA into the WMCU, the PA’s current consumption can be minimized more effectively. There are no losses due to poor matching between the PA output and the booster amplifier and no overdesigning of the transmit chain to compensate for temperature and voltage variations. A completely integrated PA enables full control of the PA’s operation and ensures the lowest power consumption.
There are many applications that operate at 2.4 GHz, and in these cases IC vendors have an opportunity to simplify the system design by integrating matching circuits and providing a single-ended RF input and output. Sub-GHz applications tend to span a very wide frequency range, from hundreds of MHz up to 1 GHz. In these cases, it is not feasible to integrate matching components. However, integrated passive devices used externally with the WMCU, and comparable in cost with discrete implementations, will become available for use in the most popular frequency bands.
Antennnas
No discussion of wireless wearable devices is complete without considering the antenna’s transmit and receive characteristics. Due to size and cost constraints, most antennas for wireless wearable devices tend to have poor transmit characteristics, as they are often simply printed on the PCB material like FR4. The simplest way to compensate for a lossy/low gain antenna is to increase the RF output power. Unfortunately, this can consume far more power than where the antenna has been optimized. Better designed and lower loss matching circuits will ensure optimized operation, but the antenna design remains the big challenge, considering the varied RF environment of a wearable device. Mismatch fluctuations due to proximity to the user’s body, such as a hand covering the device, can cause many problems. Some WMCU devices have integrated antenna tuning circuits that actively compensate the antenna during these times. Such circuits play an important role in controlling power consumption and ensuring that radiated emissions stay within regulatory limits.
One method to compensate for poor antenna reception is to design the system with antenna diversity (i.e., with multiple antennas). Though many applications will benefit from antenna diversity, there are some factors to consider. First, antenna diversity tends to help most when the distance between the transmitter and receiver is such that the received signal level is near the background noise level (i.e., near the end of link range) or in fading environments created by multipath propagation or obstacle shadowing of the signal.
To reduce power consumption and die cost, wireless MCU ICs integrate only one receive path. So antenna diversity must be performed through an external switch that alternately selects between the two antennas. However, sharing of one receive path by two antennas may consume more power than one might expect. In this case, the transmit preamble length has to be extended to provide enough time for both antennas to be sequentially evaluated. There is also the added computational cost and current consumption to analyze and select the best antenna.
Separation Anxiety
Finally, there is the issue of space. The minimum spacing between antennas recommended in wireless communication systems is ¼ λ. At 2.4 GHz, the wavelength is 125 mm, so separating the antenna by the minimum of ¼ λ or 31.25 mm is feasible with some wireless wearable devices. However, for WWDs operating in sub-GHz frequencies, the challenge becomes far more difficult. At 868 MHz, the antennas should be separated by a minimum of 86 mm, which may preclude the use of antenna diversity in many applications. An engineer must therefore trade off improved range and reception for added complexity and size, computation cost and current consumption. Assuming that antenna separation is not an issue, the increased computation cost and associated current consumption can be addressed. In a variable or unsynchronized environment, periodic toggling between antennas is required because the radio has no prior knowledge of which antenna will prove to be the “better” antenna when the packet arrives. Some transceivers use an integrated preamble quality detector to determine signal quality based on RSSI values and to confirm arrival of a valid packet on both antennas. The benefit of an integrated detector is that it will select the best antenna and, by offloading the MCU, will also decrease overall power consumption during the selection process.
Conclusion
If Chester Gould were alive today, he would certainly be impressed by how his vision has been realized. Companies have already delivered devices far beyond Dick Tracy’s walkie-talkie enabled wrist-watch and are developing a wide range of advanced wearable devices. As designers try to pack more and more features and functionality into their wireless wearable devices, the underlying concerns will remain the same – how will they achieve low power consumption, fit the design into a small form factor and ensure reliable wireless communication with the device? The final concern is how to achieve these product design goals for as low a price point as possible, but that is a topic for another day. “Six-two and even, over and out.”
Mesh Network Protocols for the Industrial Internet of Things
Ross Yu, Linear Technology Corp. (Dust Networks Group), Milpitas, Calif.
One of the biggest promises of the Industrial Internet of Things is to leverage real-world data gathered through wireless sensor networks (WSN) to drive higher efficiencies and streamline business practices. The demands on WSNs are diverse, with sensors placed throughout buildings, city streets, industrial plants, tunnels and bridges, moving vehicles or in remote locations such as along pipelines and weather stations. A common requirement across such applications for the Industrial Internet of Things is for WSNs to deliver both low power and wire-like reliability and to do so across a broad spectrum of network shapes, sizes and data rates.
Wireless mesh networks have become increasingly well accepted due to their ability to cover large areas using relatively low power radios that relay messages from node to node and to maintain high reliability by using alternate pathways and channels to overcome interference. One technique in particular, Time Synchronized Channel Hopping (TSCH) mesh networking, pioneered by Linear Technology’s Dust Networks and incorporated into the WirelessHART industrial standard, is field proven to deliver the performance needed by the Industrial Internet of Things. TSCH networks typically experiencing >99.999 percent data reliability and all wireless nodes, even routing ones, have multi-year battery life on small lithium batteries. However, a variety of mesh networks use similar sounding networking techniques (e.g., “frequency agility” vs. “channel hopping,” “sleepy” vs. “time synchronized”), yet yield drastically different performance levels. These wireless networking details determine how such protocol level choices greatly impact a WSN’s performance and the network’s overall suitability for an application.
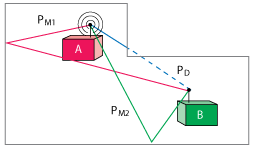
Figure 3 A radio signal's strength at the receiver (B) is affected not only by the direct path (PD), but also by reflections (PM1 & PM2), which may arrive out of phase and cause significant fading.
Wireless Sensor Network Challenges
Since wireless networks can be unreliable, it is important to understand the sources of unreliability and account for them in a communications system. Unlike wired communications, where the signal is shielded from the outside world by cabling, RF propagates in the open air and interacts with the surrounding environment. There is the possibility other RF transmission sources will cause active interference.
However, much more common is the effect of multi-
path fading, where the RF message may be attenuated by its own signal reflected off surrounding surfaces and arriving out of phase (see Figure 3). Mobile phone users experience multipath fading every day when their phones seemingly have poor signal strength in one spot, but it improves by moving just a few centimeters. The effects of multipath change over time, as nearby reflective surfaces (e.g., people, cars, doors) typically move. The net result is that any one RF channel will experience significant variation in signal quality over time.
Further adding to the challenge is that multipath fading is unpredictable. By definition, a network must be actively transmitting on a channel to experience (and therefore measure) the channel’s performance in the face of multipath fading. Therefore, while the notion of using a simple passive signal strength measurement (RSSI) of an unused channel may be helpful to detect active interferers, it cannot predict that channel’s suitability in the face of multipath fading. Fortunately, since multipath fading affects each RF channel differently and changes over time, using channel hopping for frequency diversity minimizes the negative effects of multipath fading. The challenge for WSN protocols is the ability to use channel hopping over large networks with multiple hops.
Common Approaches
To understand how different WSNs perform in the face of these constraints, let us examine techniques often used in some wireless mesh networks to address frequency diversity and to deliver low power.

Sidebar 1 Multipath fading causes the quality of a link to vary dramatically, even when moving the receiver by only a couple of centimeters.
Single Channel WSNs and Channel Agility– A common approach in simple implementations of wireless mesh networks is to have all nodes operate on a single channel. Since only one RF channel is used, only one device can be transmitting at a time. Network stack developers often still choose single channel operation due to the relative simplicity of implementation, and in doing so provide a WSN with virtually no frequency diversity.
In order to respond to the presence of active RF interference in channel, some single channel WSNs have a mechanism called channel agility, where a network can broadcast a message to all nodes to change the operating channel. But even in channel agile networks, at any point in time the network is still operating on a single channel. The use of channel agility assumes that there is a single channel that is good for the entire network. However, with the effects of multi-path fading, real world data shows that any RF channel will experience severe path degradation during the lifetime of the network, causing nodes to drop out for periods spanning minutes or hours. (See sidebar:“The Effects of Multipath Fading on Wireless Communications.”) While a network with channel agility can change the channel away from an active interferer, the network is still susceptible to the devastating effects of multipath fading.
SIDEBAR
The Effects of Multipath Fading on Wireless Communications
Multipath fading depends on the position and nature of every object in the environment and is unpredictable in any practical setup. One good property is that the topography depicted in Sidebar 1 changes with the frequency. If a packet is not received because of multipath fading, retransmitting on a different frequency has a high probability of succeeding.
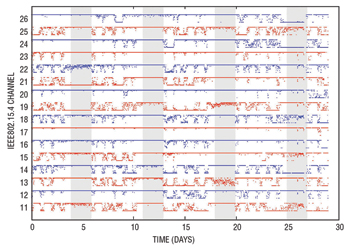
Sidebar 2 The packet delivery ratio of a wireless link varies over time.
Because objects in the environment are not static, the effect of multipath changes over time. For example, cars drive by and doors are opened and closed, Sidebar 2 shows the packet delivery ratio on a single wireless path between two industrial sensors over the course of 26 days and for each of the 16 channels used by the system. There are weekly cycles where workdays and weekends are clearly visible. At any given time, some channels are good (high delivery), others poor, and still others highly varying. Channel 17, while generally good, has at least one period of zero delivery. Each path in the network shows qualitatively similar behavior but unique channel performance. There is never any one channel that is viable everywhere in the network. The key to building a reliable wireless system is to exploit channel and path diversity to mitigate interference and multipath fading.
Duty Cycling by Network-Wide Sleeping- For low power operation, wireless sensor networks perform some form of duty cycling to minimize the percentage of time spent in active operation (e.g., transmit or receive, which typically draws milliamps of power) and maximize the percentage of time spent in a low power sleep mode (typically 1 mA or lower). Some wireless sensor networks incorporate a network-wide sleeping scheme (sometimes called a “sleepy” mesh), in which all the nodes in the network are put into a low power sleep state for an extended period and wake up at approximately the same time to send/receive/forward network traffic. In such sleep schemes, the network is completely unavailable for communications during the inactive period. For example, if a WSN only wakes once an hour for communications, then the network is unable to send an alarm message during that hour, nor can it receive a message from a controller to light up an attached warning indicator. It is also important to consider how the use of network-wide sleeping affects the WSN’s ability to cope with real-world operating conditions. During the extended sleep periods, the surrounding RF environment remains dynamic and changing. Any signal pathway that became unusable during network sleep can only be repaired when the network awakens. Even more troublesome is the fact that sleepy networks tend to be single channel networks, placing further stress on the network during its active period and adding to the risk of communication instability.
Another repercussion of using network-wide sleep is that a network-wide sleeping approach forces a user to settle for a slower data rate (and therefore less data) than could be called for by the application. This is an unfortunate trade-off, since the main purpose of a WSN is data reliability and to use that information to enable deeper insight into the user’s systems, showing operational trends and inefficiencies such as degrading performance in aging motors, or increased cyclic power draw of old refrigeration equipment in a retail store. When the data delivered by the WSN is sparse due to network limitations, the utility and insight derived from the WSN becomes limited and runs the risk of reducing the overall value proposition of the monitoring/control system.
Time Synchronized Channel Hopping Mesh Networks
Time Synchronized Channel Hopping (TSCH) mesh networks use tight time synchronization across a multi-hop network to closely coordinate communications and frequency channel usage. In a TSCH network, each node shares a common sense of time that is accurate across the network to within a few tens of microseconds. The nodes exchange timing offset information with neighboring nodes to maintain time synchronization. Network communication is organized into time slots, in which individual packet transmit/receive opportunities are scheduled. Each time slot is long enough (e.g., 7.5 ms) for a transmitting node to wake up, transmit a packet, and receive its link-layer acknowledgment from the receiving node. Data traffic in a TSCH network can be dynamically scheduled, which enables pair-wise channel hopping, full path and frequency diversity, low power packet exchange and high-availability duty cycling.
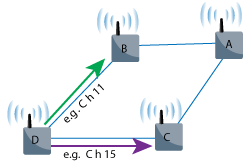
Figure 4 If communication fails on the "green" arrow, node D retries on the "purple" arrow using another channel and pathway.
Pair-Wise Channel Hopping - Time synchronization enables channel hopping on every transmitter-receiver pair for frequency diversity. In a TSCH network, every packet exchange channel hops to avoid RF interference and fading. In addition, multiple transmissions between different device pairs can occur simultaneously on different channels, increasing network bandwidth. For example, there are fifteen usable channels available in the IEEE 802.15.4 2.4 GHz radio specification, which is a popular choice for WSN implementations due to the global availability of this ISM band. This represents up to 15 times the available bandwidth for a TSCH network, compared to that of a single-channel 802.15.4 WSN.
Full Path and Frequency
Diversity - Each device has redundant paths to overcome communications interruptions due to interference, physical obstruction or multipath fading. If a packet transmission fails on one path, a mote will automatically retry on the next available path and a different RF channel (see Figure 4). By exercising path diversity and frequency diversity on each retry (time diversity), the probability of success on each retry is higher compared to a single-channel system.
Low-Power Packet Exchange- The use of TSCH allows nodes to sleep at ultralow power between scheduled communications. Each device is only active if it is sending a packet or listening for a potential packet from a neighbor device. More importantly, since each node knows when it is scheduled to wake up, each node is always available to relay information from its neighbors. Therefore, TSCH networks often reach duty cycles of <1% while keeping the network completely available. Furthermore, since each packet transaction is scheduled, there are no in-network packet collisions in a TSCH network. Networks may be dense and scale without creating debilitating RF self-interference.
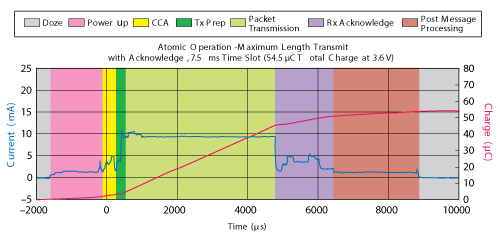
Figure 5 The current during packet transmission and receipt of the link-layer acknowledgement. With TSCH-optimized hardware, individual transactions can reach as low as 54.5 µC.
High Availability Duty Cycling– Unlike in a network-wide duty cycled network, in a TSCH network individual nodes wake up their transceivers only when they need to transmit a packet or listen for a packet to be received. By scheduling network traffic to the granularity of individual transmitter-receiver exchanges, a TSCH network can easily accommodate heterogeneous data traffic across the network. For example, if there is a tank level sensor that only needs to transmit once an hour, and elsewhere, pressure/flow sensors that report every few seconds, then a TSCH network will wake up nodes (and their parents) only as frequently as needed to reliably support its level of data traffic.
The Power of Combining TSCH with Low Power Hardware
The operating currents for 802.15.4 transceivers for general operations, such as transmit, receive and sleep, have steadily reduced over the past decade. For example, the LTC5800-IPM from Linear Technology draws 9.5 mA for a +8 dBm transmit power and 4.5 mA for receive, which is three to five times lower than prior generation 802.15.4 transceivers. Reducing peak current is a good start, but the energy required to send a packet is a function of the amount of charge drawn over a period of time. If current is measured on an oscilloscope and plotted over time (see Figure 5), then the energy required to send a packet is shown as the area under the curve and affected not only by peak currents, but also by how long each operation is active. Products such as this deliver precisely optimized packet exchanges with a successful packet transmission/acknowledgment for a mere 54.5 µC charge at 3.6 V supply voltage (or 196.2 µJ of energy).
A System Approach to Low Power
By taking a more holistic view of how energy is spent in a wireless sensor network, low power consumption can be thought of as a function of data traffic as well as the energy required to send a packet and the number of retries needed to successfully send a packet from one node to the other:
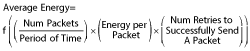
By focusing on energy per packet and using a networking protocol that exercises time, path, and frequency diversity on every retry (thereby reducing the average number of retries required to send a packet), low current consumption can be attained by improving efficiency throughout the system rather than making sacrifices on the application layer. The communication schedules in a TSCH network are highly configurable, with communications timeslots automatically allocated based on application needs. A TSCH network can be configured for slow data rates to minimize power and potentially enable the use of energy harvesting. That same TSCH network can be configured to support heterogeneous report rates, as is commonly done in industrial plants that have slow-changing variables (e.g., tank level) and faster changing variables (e.g., flow in a pipe). A TSCH network will automatically allocate the required timeslots to the portions of a network that need it. Instead of forcing users to tailor their applications to meet the needs of the network, a TSCH network can be tailored to meet the needs of a wide variety of applications.
Enabling the Industrial Internet of Things
TSCH is already a foundational building block of existing industrial wireless standards, such as WirelessHART (IEC62591), and is an enabling piece of emerging Internet Protocol-based WSN standards, including IEEE802.15.4e.1 Work is underway to standardize a TSCH link layer within the IETF 6TiSCH group as well.2 The adoption of TSCH into relevant standards will continue to encourage far-reaching adoption. TSCH networks have already proven to deliver multiyear battery life and >99.999 percent data reliability in such diverse and demanding applications as industrial process monitoring,3 fence line perimeter security,4 data center energy efficiency,5 and metropolitan-scale smart-parking solutions.6 By delivering highly reliable, low-power wireless networks that are highly configurable, TSCH networks are ideally suited for the Industrial Internet of Things.
References
- Reliable, Low Power WSNs for the Internet of Things, www.linear.com/docs/44202.
- https://datatracjer.ietf.org/wg/6tisch/charter/.
- Emerson Process, www.linear.com/docs/41383.
- Integrated Security Corp., www.isc-hydra.com.
- Vigilent, www.linear.com/docs/41384.
- Streetline, www.linear.com/docs/41387.