

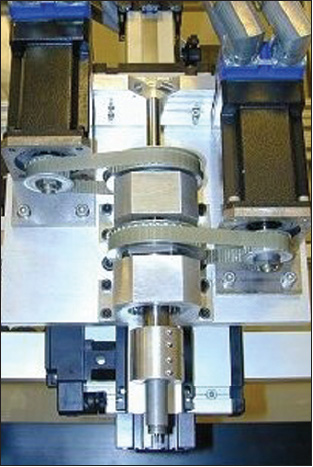
COM DEV Ltd. uses a RoboCAT (Robotic Computer-aided Tuning) automation system to achieve scaleable capacity, increased product consistency, in-line quality assurance, and reduced schedule and cost. Figure 1 shows a RoboCAT system at work at COM DEV. The company is the world’s leading supplier of filters, multiplexers and switches for communications satellites (see Figure 2). For more than twenty years, the company has made significant investments in its software design tools and RF performance simulation capability. These tools have been validated on satellite hardware and have proven to be so precise that extremely demanding devices can now be machined directly for space flight production without the need for a costly, time-consuming breadboard stage. Still, final tuning is required to remove the effects of machining tolerance and, to a smaller extent, simulation inaccuracies. RoboCAT addresses this challenge with a combination of advanced automated tuning algorithms and clever automation tools.

The final tuning stage has traditionally been an unpredictable bottleneck in the production of high frequency precision filters and multiplexers. RF filter tuning is a learned skill, and new hires require many months or years to become proficient at tuning even the simplest devices. Among experienced tuners there is a wide variation in the speed at which they are able to produce finely tuned hardware, as well as in their ability to tackle sensitive hardware. Therefore, device tuning is a potential source of schedule and cost risk, as well as an impediment to rapid changes in production capacity.

Computer-aided tuning (CAT) software was first deployed on the COM DEV production floor in 1995, and was used to augment manual tuning of satellite multiplexers. With CAT, the technician was guided through the tuning process with instructions on which screws to adjust and how far to turn to achieve optimal filter performance. CAT quickly became the tuning standard for the multiplexer product line and had an immediate impact on reducing cost and cycle time. The original software has been enhanced and refined since then, and is still being used on many product lines today.
The introduction of CAT enabled the company to decrease the skill level needed for tuning its most complex subsystems and allows multiple technicians to be involved with tuning a single device. Previously, a single technician was assigned to the task as the techniques employed by each tuner may be incompatible with those of the others. With CAT guiding the tuning process, technicians are able to hand-off a tuning task at any time, running multiple shifts if required to meet accelerated delivery requirements (see Figure 3). Computer-aided tuning replaces the “black art” of filter tuning with a systematic approach for improved operational efficiency and productivity.
While the CAT system vastly improves the predictability of tuning, it is still a manual process that is not well suited to the higher volume production requirements of the wireless marketplace. To deal with it’s higher volume product lines, COM DEV has developed a custom tuning robot capable of enacting fine tuning screw adjustments.
The company employs a development strategy based on Design For Manufacturing, Assembly, Integration and Test (DFMAIT). In this philosophy, both the product and relevant processes are developed concurrently to maximize product uniformity, production rate and performance. However, some product lines have been in production for many years, and it is costly to modify them near the end of their life cycle. Therefore, when the idea of producing a tuning robot was introduced, it was decided that RoboCAT should be designed to interface with existing product lines without any modifications, but should be capable of taking advantage of automation friendly enhancements to new products as they are introduced.
A replaceable coaxial screw/nut driver head was created, as shown in Figure 4, allowing simultaneous independent servo driven control of a tuning screw and its lock nut. This capability is crucial in allowing the robot to perform the final tuning screw lockdown on sensitive products where the lockdown procedure can affect the device performance. The system is able to predict the effect of tightening the nut, and make micro adjustments to the tuning screw position to counteract the associated detuning. The screw/nut driver can be easily swapped to handle different screw/nut combinations, and has been used on screws ranging in size from a #2 hex to an M6 Torx. By making the tool heads customizable and interchangeable, the company was able to prove its technology on existing products while ensuring that the machine can take advantage of future product enhancements.
The system is fully compatible with self-locking screws and other nutless screw designs; however, these design elements often have poor passive intermodulation (PIM) performance and are often incompatible with the stringent product specifications of the space and aerospace market. If design specifications allow the use of self-locking screws, the nut driver can be disabled for faster tuning time without changing the tuning procedure.
With the introduction of the automated tuning robot, it was soon discovered that the original CAT tuning strategy was not well suited to machine tuning. There were no checks and balances to allow the algorithm to determine when it had settled on an invalid solution, and tuning runs would sometimes get caught in a loop searching for the best solution. The deficiencies were being masked by the intelligence of manual CAT operators who were unconsciously helping avoid these issues, but became painfully obvious when a machine was blindly following the instructions dictated by the CAT engine.

Working closely with COM DEV technicians on the floor and RF engineers, RoboCAT developers were able to characterize the manual tuning process, and incorporate some of that knowledge into a comprehensive, multifaceted tuning strategy (see Figure 5). New tuning algorithms based on manual techniques were added, and several experimental tuning strategies were made available to the CAT software. An adaptive control algorithm that intelligently selects from the myriad algorithms was employed in an effort to minimize tuning time while maximizing device consistency. The adaptive approach allows the system to tune devices that would be impossible to tune using a single algorithm approach, and increases the allowable physical variation from unit to unit. The resulting CAT methodology combines real-time parameter extraction, sensitivity analysis, automated error vector generation and advanced optimization techniques. The final result is a CAT algorithm suitable for use in a fully automated system that is able to avoid many of the pitfalls of earlier automation attempts.
At each stage in the tuning process, RoboCAT selects from the available tuning strategies based on the results of the previous stage as well as embedded knowledge of the device being tuned. A script-driven decision process controls the actual tuning sequence. Standard generic scripts are used for new products; however, statistical analysis of tuning cycle times can be used to tweak the script to favor the optimal sequence for each product.
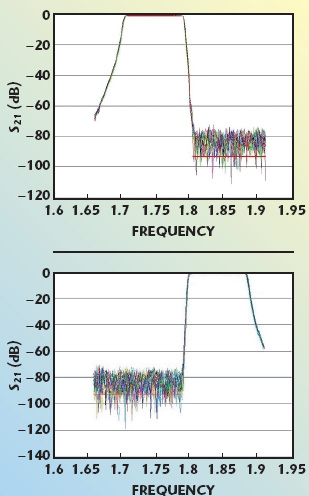
RoboCAT replaces a tedious and unpredictable process with control and repeatability in production. While the adaptive tuning strategy employed by the RoboCAT system is flexible enough to deal with wide device variation, there is a time penalty as additional tuning strategies are engaged to deal with increased deviation from the design “gold standard” unit on which the tuning template was based. By monitoring tuning sequences and times for departures from the norm, production line build issues can be identified for investigation. If tuning times change, a flag is raised indicating that there is a problem upstream in the production line. In this way, the automated tuning station serves as an in-line QA checkpoint. By identifying assembly deviations and bringing build parameters closer to the design template, tuning time is reduced whether robotic or manual tuning is employed. Implementing automation and reducing the human factor from this critical process has increased uniformity and enhanced product quality, as shown in Figure 6.
The RoboCAT system has been found to be faster than an average manual CAT tuner, but the greatest throughput advances are being realized by maximizing machine uptime, minimizing setup and retooling costs, and ensuring that additional parallel machines could be easily added to scale production capacity as needed. Therefore, reliability, consistency, simplicity of use and flexibility were the main design objectives of the RoboCAT team. By operating the machine 20 hours a day, actual throughput per machine easily outpaces several human tuners, and the results are consistently closer to the design template of the device being tuned.
RoboCAT is a highly reliable, low maintenance solution that can be easily scaled as production increases. Because the number of custom hardware components has been minimized, additional machines can be added with very short lead times, thus eliminating tuning capacity as a roadblock to increased production capacity.
Focusing on what they do best, COM DEV relied on internal RF and software expertise to complement a mostly off the shelf mechanical system thus minimizing development time and increasing reliability and flexibility of the whole system. By using off the shelf hardware along with custom software components and proprietary RF analysis tools, the company created a flexible tuning system capable of tuning complex precision filters and multiplexers for aerospace, space and wireless applications. A modularized solution means that the system can be updated with more processing power and faster, more accurate measurement equipment with minimal changes to the system software and hardware. COM DEV has successfully implemented its RoboCAT system for its highest volume products with dramatic improvements in cost, cycle time and product quality. Additional information may be obtained via e-mail at ming.yu@comdev.ca.
COM DEV Ltd.,
Cambridge, Ontario, Canada
(519) 622-2300,
www.comdev.ca/codeone.