
As is well known, there are two general types of altimeter systems - a pulse radar altimeter and a frequency modulated, continuous wave (FM-CW) radio altimeter. Aircraft radio altimeters typically operate at altitudes from 0 to 8000 feet utilizing separate antennas for transmit and receive. Such radio altimeters have been described by many authors.1-3
Two-antenna, FM-CW radio altimeters have several disadvantages. One is their high cost and weight of cables and antennas, especially in double or triple redundant radio altimeter systems on such aircraft as in commercial airlines. With two antennas, multi-path or double bounce is an additional disadvantage. With double bounce, strong signals from the transmit antenna reflect from the ground to the fuselage of the aircraft, back to the ground and back again to the receiver antenna, giving an altitude indication about twice the actual altitude.
Another disadvantage with a two-antenna, FM-CW radio altimeter system is the need for high isolation between transmitter and receiver antennas, resulting in rigid requirements for antenna side lobe suppression and for the antenna's location on the aircraft fuselage. The spacing between the two antennas must be large to obtain high isolation. However, this results in poor accuracy at low altitudes, of the order of meters, because the distance between the transmitter and receiver antennas is greater than the aircraft lowest altitude.
The disadvantages of a two-antenna FM-CW system may be eliminated with a single antenna system. One of the attempts to design a single-antenna aircraft altimeter was undertaken by Lazarus.4 This single-antenna FM altimeter operates in a pulse mode where a transmitter transmits for a short period and then a transmit-receive switch switches the antenna to a receive for another short period. This approach has several disadvantages that limit its use as an aircraft altimeter. Typical aircraft FM-CW altimeter requirements are to measure altitudes from 0 to 8000 feet with an accuracy of 1.5 ft (46 cm) for low altitudes and two percent for high altitudes. At the low altitudes, these requirements are difficult to meet with the pulse mode of this system. In the pulse mode altitude, measurements near 1.5 feet require a pulse width of about 3 ns with a repetition rate of near 300 MHz, resulting in a receiver bandwidth of 1.5 GHz. These parameters cannot be easily realized in an aircraft radio altimeter with low cost, weight and size. This article describes an aircraft single-antenna FM radio altimeter system that provides improved performance over two-antenna radio altimeter systems while solving the attendant problems of a single-antenna altimeter.
Single-antenna Radio Altimeter Block Diagram
The block diagram of a single-antenna FM radio altimeter is shown in Figure 1 .5 This altimeter operates in a CW mode at all altitudes that are equal or lower than a predetermined critical altitude HCR, and an interrupted ICW mode at all altitudes that are greater than HCR.
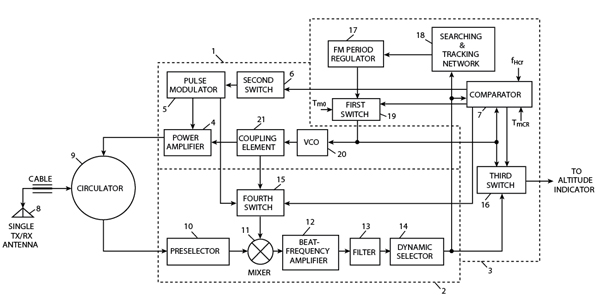
The single-antenna FM radio altimeter comprises a transmitter (1), a receiver (2) and a processing block (3). In the CW mode, the FM radio altimeter operates with the transmitter and receiver on at the same time. When in the ICW mode, the transmitter is pulsed on and off with the receiver disabled when the transmitter is on; the receiver receives the signal reflected from the ground during the off time of the transmitter.
When, in the ICW mode, the period of the frequency modulation becomes equal or less than a critical value corresponding to the critical altitude HCR, the CW mode is switched on. In the CW mode, when the altimetric beat frequency becomes equal or greater than its maximum corresponding to the critical altitude HCR, the ICW mode is enabled.
In the transmitter, a pulse modulator (5) modulates the power amplifier (4) to generate the interrupted CW signal. The transmitter is pulsed with a constant pulse repetition period Trm that is equal to twice the delay time of the ground echo signal for a maximum aircraft altitude Hmax. A second switch (6) may be used to switch off the pulse modulator in the CW mode and switch on the pulse modulator in the ICW mode. This second switch is controlled by a comparator (7).
In the receiver, a filter (13) suppresses a parasitic transmitter signal reflected from the mismatched single antenna (8) and from other elements between the transmitter and the antenna in the CW mode. A fourth switch (15) switches on the local oscillator (LO) power from the transmitter during the CW mode and during the ICW mode in the receiving half period and switches off the LO power during the ICW mode in the transmission half period. The fourth switch is controlled by the pulse modulator in the ICW mode.
In the processing function block, a two-criterion comparator (7) is connected to an output of a dynamic selector (14) through a third switch (16). The comparator in the ICW mode compares the current value of the period Tm of an FM period regulator (17) with a critical value TmCR corresponding to the critical altitude HCR. At values of the FM period equal or less than the critical value, the comparator switches on the CW mode. In the CW mode, the comparator compares the current value of the altimetric beat frequency fH from the dynamic selector 14 with a maximum value fH CR corresponding to the critical altitude HR, so that at fH equal to or more than its maximum fH CR, the comparator switches to the ICW mode.
Also in the processing function block, a searching and tracking network (18) supplies the value and sign of a correction signal for regulation of the FM period in the ICW mode by controlling the FM period regulator. The FM period regulator changes the FM period of the modulating signal, such as a saw tooth or triangular waveform in proportion to the altitude so that the altimetric beat frequency fH is maintained equal to the predetermined constant value fHo in the ICW mode.
A first switch (19) in the processing function block connects a VCO (20) to the output of the FM period regulator in the ICW mode. This first switch also provides a constant signal to the VCO that corresponds to the predetermined constant value of the FM period Tmo in the ICW mode.
The third switch (16) connects an external altitude indicator (not shown) to the output of the first switch (19) in the ICW mode, and to the output of the dynamic selector in the CW mode to provide the altitude indication.
The processing function block that includes the comparator, searching and tracking network, FM period regulator, first switch and third switch may be implemented in a digital processor.

Flight Operation of a Single-antenna FM Radio Altimeter
Figure 2 illustrates the operation of the single-antenna altimeter when in flight. During the aircraft take off and climb to an altitude less than the critical altitude (H < HCR) the FM radio altimeter is operating in the CW mode. The altimetric beat frequency is less than the critical beat frequency (fH < fHCR) and the comparator places the switches in the following positions: the first switch (19) connects the VCO with the source (not shown) having the constant FM period Tmo that is optimal for the CW mode; the second switch (6) switches off the pulse modulator; the third switch (16) connects the external altitude indicator to the output of the dynamic selector; and the fourth switch (15) connects the coupling element (21) with the mixer (11) to provide a local oscillator signal from the transmitter to the mixer.
During the climb, when the altitude increases to its critical value HCR, the beat frequency fH reaches its maximum value fHCR for the CW mode. At fH > fHCR the comparator in the processing function block places the switches into the positions corresponding to the ICW mode as follows. The first switch (19) connects the VCO to the output of the FM period regulator to receive a variable period modulating signal Tm and disconnects it from the source with modulation period reference Tmo. The second switch (6) switches on the pulse modulator. The third switch (16) connects the external altitude indicator to the output of the first switch (19) to receive the variable rate modulation signal Tm. The fourth switch (15) switches on the local oscillator signal from the coupling element during the ICW mode in the transmission half period. The fourth switch is controlled by the pulse modulator during transmit-receive transitions.
When at the critical altitude HCR in the ICW mode, the VCO is connected to the FM period regulator through the first switch and the modulation period for the critical altitude TmCR is set. In the ICW mode, the beat frequency fHo is held constant by the searching and tracking network, and the modulation period Tm varies with altitude H. For all altitudes H > HCR, the FM period Tm is measured as a signal parameter representative of the altitude above the ground.
During the landing stage of flight, the decreasing altitude H crosses HCR and the FM period Tm crosses TmCR, and the comparator returns the switches to the positions previously described for the CW mode. The FM radio altimeter operates in the CW mode until the aircraft lands.
A different HCR is shown for climb and landing. During landing or take off, a horizontal flight at or near critical altitude HCR is possible that may cause undesirable irregular switching between CW and ICW modes. This effect may be eliminated if the comparator has two independent thresholds at critical altitude. In the CW mode, the critical altitude threshold is increased (HCR ) for switching from the CW mode to the ICW mode and the critical altitude threshold decreases (HCR
) for switching from the CW mode to the ICW mode and the critical altitude threshold decreases (HCR ) for switching from the ICW mode to the CW mode.
) for switching from the ICW mode to the CW mode.
CW Mode Characteristics
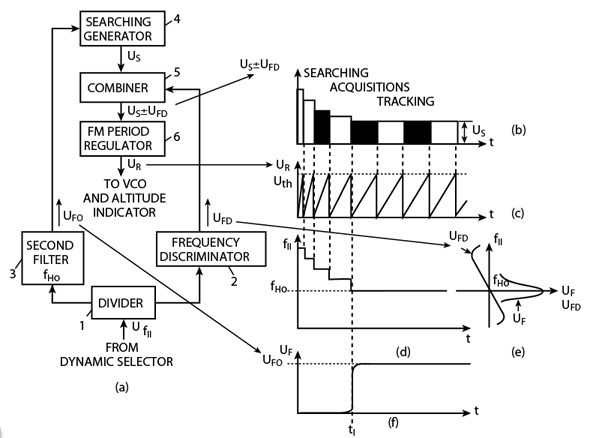
In the CW mode, the FM radio altimeter operates with a constant modulation period Tm0. The altimeter transmitted signal frequency deviation W0 and FM modulation period Tm0 are maintained constant. For a given value of Tm0, the current altimetric beat frequency is

where
c = velocity of light
H = aircraft altitude
This frequency becomes proportional to the altitude H and is measured as a signal parameter representative of the altitude above ground in the CW mode. Large values of altimetric beat frequency fH are needed for the lowest altitudes because a high absolute precision of the altitude H measurements requires increasing the number of fH periods corresponding to every foot of altitude. Thus, at low altitudes in the CW mode there are no restrictions on altimetric beat frequency for maximum altitude fHmax, which may be chosen as large as needed.
In the CW mode, typical signal parameters for the 4.3 GHz single-antenna FM altimeter are: frequency deviation W0 = 130 MHz; constant FM period Tm o = 1 ms; and the variable beat frequency is in accordance with Equation 1, for H = 3 ft, fH = 800 Hz, and for H = 400 ft, fH = 106 kHz; and HCR = 400 ft.
In the CW mode, time isolation between transmitter and receiver modes is impossible. At the lowest altitudes, the greatest source of error is the leakage into the receiver channel of a strong parasitic CW transmitter signal, reflected from the mismatched antenna or from other elements between the transmitter and the single antenna. The antenna can never be perfectly matched to free space, and there will always be some transmitter signal reflected back toward the receiver. This signal has a constant frequency

where
 = velocity of frequency deviation
= velocity of frequency deviation
lac = length of the antenna cable connecting the antenna with transmitter-receiver block
The bandwidth of this parasitic signal is much less than the bandwidth of the useful altimetric echo signal reflected from the extended ground surface. A narrow stop-band filter or a high pass filter can be inserted in the receiver chain to suppress the parasitic signal without any distortion of the altitude measurement.

Figure 3 illustrates an example with a narrow stop-band filter (6), which is tuned to the frequency fac (Equation 2) to suppress the parasitic signal of the transmitter reflected from the mismatched single antenna (1). Figure 4 shows the spectral components of the received signals at G different points in the chain, while k represents the frequency characteristics of the filter (6) and the dynamic select. The frequency fac of the parasitic signal must always be less than the lowest frequency of the echo signal fH.
ICW Mode Characteristics
In the ICW mode, the FM period Tm varies in proportion to the altitude H to maintain the altimetric beat frequency fH0 constant at all altitudes. Keeping the altimetric beat frequency constant allows a narrowing of the receiver bandwidth and a corresponding improvement of the receiver sensitivity (improving the signal/noise ratio). In the ICW mode, the FM period Tm is equal to

and may be measured at the parameter representative of the altitude H above ground
At higher altitudes in the ICW mode, the pulse repetition frequency Frm, required to pulse modulate the transmitter for maximum altitude Hmax, may be determined from

The predetermined pulse repetition frequency Frm may be selected much greater than the constant altimetric beat frequency fHo. The pulse repetition frequency Frm is not critical for the measurement of the FM period Tm in the ICW mode. For example, for Hmax = 8000 ft, the pulse repetition frequency from Equation 4 is 31 kHz. The predetermined altimetric beat frequency fHo should be much less than Frm and provide good accuracy in the ICW mode. For fHo = 0.5 kHz (THo = 2 ms), the quantity of pulses (N) during a half beat frequency period (THo/2 = 1 ms) is N = (THo/ 2)/(1/Frm) = 1 ms/(1/31 kHz) = 1 ms/0.032 ms = 32 pulses. Therefore, the zeroes count of the beat frequency has a gate equal to 180°/32 = 5.6° and the accuracy of the measurement is

This accuracy is acceptable for high altitudes in the ICW mode.
In the ICW mode, the time isolation between the transmitter and receiver is obtained when the ground echo signal is received during the pauses between the transmitter pulses. At the highest altitudes, these pauses cannot exceed 20 to 30 µs. The FM modulation period Tm usually exceeds several milliseconds. The pulse modulation is inside the FM period and should not interfere with the received signal.
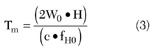
The transmitter pulse modulation characteristics should be optimized in the ICW mode. For best sensitivity, a pulse signal with a maximum duty cycle (DC) of 50 percent is needed where DC = ti/Trm = 0.5, where ti is the pulse width and Trm is the repetition period. At the maximum altitude Hmax, the best sensitivity of the receiver can be realized if the pulse width ti as well as the width of the pause tps are equal to the delay time of the echo signal from the ground (tHm = 2Mmax/c) and correspondingly the ICW pulse repetition period is
Trm = ti + tps = 4 Hmax/c (5)
In Figure 5 the transmitter pulses are shown by bold lines as with pulse 1, the ground echo signals are shown by normal lines as with pulse 2, and the effective time of their possible processing in the receiver trcv by the shaded part 3 of pulse 2.
The timing diagrams 4, 5 and 6 show that all of the pause interval tps may be utilized for reception of the echo ground signal at the maximum altitude Hmax only if
ti = tps = tHmax (6)
The energy of the echo signal pulse is
E = Pi trcv (7)
where
pi = peak power of the echo signal pulse
It is known that when H decreases, then Pi increases inversely proportional to the square of the altitude, H2. As shown, for the waveform 7 for the altitude H = Hmax/2 compared with waveform 5 for H = Hmax, the energy of the echo signal pulse will grow not less than 22/2 = 2 times. Thus, at the constant repetition period Trm selected according to Equation 4 and with the current altitude of the aircraft decreasing, the energy of the echo signal pulses at the receiver input increases. For example, at the typical values of altitude H of 8000 ft and critical altitude HCR of 400 ft, the relative altitude variation is 8000/400 = 20 times. For the critical altitude HCR, the energy of the pulse will be not less than 202/20 = 20 times more than the energy at maximum altitude Hmax. On the basis of these results, the ICW repetition period Trm is held constant for all altitudes and the period is Trm = 32 µs or a repetition frequency no more than 35 kHz.
In the ICW mode, typical pulse modulation parameters are duty cycle (DC) = ti/Trm = 0.5; pulse repetition period Trm = 1/Frm and the pulse repetition frequency Frm= c/4 Hmax = 31 kHz. At the maximum altitude Hmax= 8000 ft, Trm = 32 ms and ti = 0.5 x Trm= 16 µs. In the ICW mode, the typical frequency modulation parameters are the predetermined beat frequency fHo = 0.5 kHz ( fHo << Frm ) and the FM period Tm variable in accordance with Equation 3.
To improve the accuracy of lower altitude measurements in the ICW mode, two or more altitude ranges may be used. For a lower altitude range, the pulse repetition period should be less than for a higher altitude range. For example, an altitude range from 8000 to 2000 ft with pulse repetition period Trm = 32 µs and a constant beat frequency fHo = 0.5 kHz provides altitude accuracy of 1.55 percent. A second altitude range from 2000 to 400 ft with Trm = 8 µs and same constant beat frequency of 0.5 kHz results in an altitude accuracy of 0.4 percent.
Searching and Tracking Network
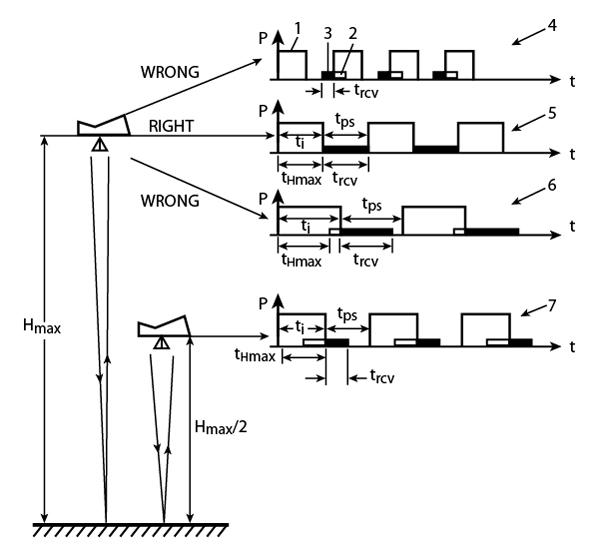
The detailed network of the searching and tracking circuit is shown in Figure 6 . An input signal from the dynamic selector is divided in a divider (1) between a frequency discriminator (2) and second filter (3). The second filter is a narrow pass-band filter having a center frequency at fHo with its output connected to a searching generator (4). The searching generator is enabled by the second filter and forms a programmed step-like searching voltage US. This searching voltage is combined in a combiner (5) with a voltage UFD from the frequency discriminator (2) and total voltage waveform US ± UFD correction signal is applied to the FM period regulator (6) to form a FM period control signal UR.
When searching is started the output of the second filter signal UF is zero, as shown in waveform f. The zero input to the searching generator enables the step-like output US. The divided beat frequency fH signal input to the discriminator provides an output UFD, as shown in graph e, which is a typical frequency discriminator characteristic. If the beat frequency fH is below the constant altimetric beat frequency fHo, the output UFD of the discriminator follows the line e and is positive (UFD). If the beat frequency fH is above the constant altimetric beat frequency fHo, the output UFD is negative (-UFD). The discriminator output UFD is added to the searching generator output in combiner to provide the output US ± UFD correction signal, as shown by waveform b.
As shown in waveform d, at t = 0, the beat frequency fH is above fHo, the discriminator output is -UFD (see graph e), and the searching and tracking network is in a searching mode. The searching generator steps down to lower level steps, as shown in waveform b as time increases (t > 0). The FM period regulator provides an input voltage UR to correct the FM period that increases linearly until it reaches the threshold level Uth, as shown in waveform c. The FM period regulator integrates the US ± UFD curve to provide the saw tooth output that modulates the VCO. The constant threshold voltage Uth of the FM period regulator corresponds to the constant frequency deviation Wo. As the searching generator steps down as in waveform b, the resulting beat frequency fH steps down, as shown in waveform d, and the discriminator output decreases, as shown in graph e. The searching generator continues to step down until the beat frequency fH reaches fHo at some time t1. At time t1, with the beat frequency equal to fHo, the narrow second filter passes the frequency fHo and the output of the second filter rises to UFo (f) to stop the searching generator thus stopping search, acquiring the signal and commencing tracking.
The searching generator output US stays at a constant level in a tracking mode after time t1. The FM period regulator, when in the tracking mode, maintains a constant period saw tooth output FM period correction signal, as shown in waveform c. When in the tracking mode, if the beat frequency fH deviates from the constant altimetric beat frequency fHo, the frequency discriminator, through the combiner, adds its input voltage UFD of corresponding value and sign to the searching generator output US. The voltage UFD added to US to form the correction signal b, which corrects the period of the saw tooth voltage Tm and causes the altimetric beat frequency fH to equal fHo. At this time, the beat frequency fH is in the pass-band of the narrow band-pass third filter and the altimeter remains in the tracking mode with the constant altimetric beat frequency fHo.
The tracking period Tm of the saw tooth voltage is measured as the parameter representative of the altitude above ground. The constant altimetric beat frequency fHo results in an effective narrowing of the receiver bandwidth due to the narrow band-pass second filter and a corresponding improvement of the signal/noise ratio at the ICW mode. The blocks of the searching and tracking network and the FM period regulator may be implemented in a coded form inside a digital processor.
Experimental TX/RCV Block
Figure 7 illustrates an experimental TX/RCV block for the single-antenna radio altimeter. This block was designed using a combination of microstrip and suspended stripline.6 The FM signal, with 0.5 W CW power, passes through a directional coupler, a circulator and an LPF to the single TX/RCV antenna. The microstrip directional coupler, with 15 dB coupling, provides LO power for a mixer. A drop-in circulator (from REC) provides 20 dB isolation between the TX and RCV networks. The LPF, using a combination of microstrip and suspended stripline, has less than 0.2 dB insertion loss and greater than 35 dB attenuation for the second harmonic.
The LO signal passes through a microstrip BPF and SPST switch which switches on the LO power during the CW mode and during the ICW mode in the receiving half period. The double-balanced mixer ALY-4 (from Mini-Circuits) has its electrical performance optimized over the altimeter frequency range with a low conversion loss of 5.7 dB.
In the receiver network, the suspended stripline BPF shows the following electrical characteristics: the insertion losses are less than 0.4 dB and the second harmonic attenuation is greater than 60 dB. The receiver LNA provides 0.8 dB input noise figure and 20 dB gain.
This TX/RCV block, with a combination of suspended stripline and microstrip elements, is effective for simultaneously providing frequency selectivity, low transmitter losses, low noise figure and small dimensions. The transition between the suspended stripline and the microstrip lines was described in Reference 6.
Conclusion
A new design of the single-antenna FM radio altimeter has been described. The single-antenna FM radio altimeter operates in continuous wave with a constant FM period CW signal below a critical altitude and interrupted continuous wave with variable FM period ICW signal above the critical altitude. The altimeter can be used for high accuracy altitude measurements in the 0 to 8000 ft range with an accuracy of 1.5 ft for low altitudes and two percent for high altitudes. This altimeter provides lower cost and weight by eliminating one antenna and its associated cable. An experimental microwave TX/RCV block provides frequency selectivity, low transmitter losses, low receiver input noise figure, small dimensions and low cost.
References
1. A.S. Vinitsky, "Principles of Continuous-wave Radar," US Department of Commerce Office of Technical Services, Washington, DC, 1964.
2. M.I. Scolnik, Introduction to Radar Systems , McGraw Hill, New York, NY 1970.
3. D.K. Barton, Modern Radar System Analysis , Artech House Inc., Norwood, MA 1988.
4. M. Lazarus, "Frequency Modulation Radio Altimeter," US Patent 4,739,330, April 19, 1988.
5. L.G. Maloratsky, "Single Antenna FM Radio Altimeter Operating in a Continuous Wave Mode and an Interrupted Continuous Wave Mode," US Patent No. 6,426,717, July 2002.
6. L.G. Maloratsky, "Reviewing the Basics of Suspended Striplines," Microwave Journal , Vol. 45, No. 10, October 2002, pp. 82-98.
Leo G. Maloratsky received his MSEE degree from the Moscow Aviation Institute and his PhD from the Moscow Institute of Communications in 1962 and 1967, respectively. Since 1962, he has been involved in the research, development and production of microwave integrated circuits at the Electrotechnical Institute, and was an assistant professor at the Moscow Institute of Radioelectronics. From 1992 to 1997, he was a staff engineer at Allied Signal. In 1997, he joined Rockwell Collins where he works on RF and microwave integrated circuits for avionics systems.